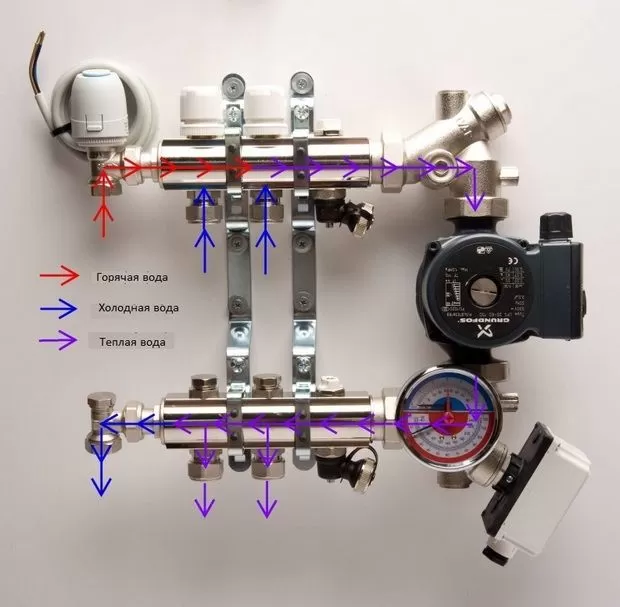
Клапаны коллектора
Основная задача клапана – смешивание горячей жидкости, которая поступает из котла, с остывшим теплоносителем из отопительного контура. Настройка клапанов осуществляется ручным способом или автоматически. Во втором случае, для регулировки необходимы сервопривод и приборы управления.
В современных моделях коллекторов для тёплого пола применяются 2 вида клапанов:
двухходовой клапан. Используется в жилищах, площадь которых менее 200 кв. м. Задачи клапана:
1) регулировать температуру посредством примеси воды к обратке;
2) корректировать количество поступающей из котла воды.
В отличие от трёхходового клапана, такая модель характеризуется малой пропускной способностью, более простой и стабильной настройкой. Данный клапан пропускает теплоноситель только в одном направлении.
трёхходовой смесительный клапан не только смешивает, но и разделяет поступающую воду. Коллектор с таким клапаном применяется в помещениях, метраж которых превышает 200 кв. м. В устройство встроены специальные погодозависимые датчики. Их задача – проанализировать погодные условия за окном и определить подходящую температуру для тёплого пола. Если тёплые полы – единственная отопительная система в помещении, тогда использование трёхходового смесительного клапана полностью оправдано. Недостатки прибора:
- возможность самостоятельной подачи жидкости из котла (температурный показатель до 90 градусов). В результате, повреждается пол, стяжка и отопительный контур.
- такой клапан имеет высокую пропускную способность. Потому небольшие перемены в настройке могут стать причиной повышения температуры в комнате.
Обратите внимание на то, что при длительном использовании, клапаны засоряются. Для упреждения засорения мастера применяют специфическую муфту – “американку”
Скетч для управления сервоприводом в Arduino
Управление сервоприводом напрямую через изменение в скетче длительности импульсов – достаточно нетривиальная задача, но у нас, к счастью, есть отличная библиотека Servo, встроенная в среду разработки Arduino. Все нюансы программирования и работы с сервоприводами мы рассмотрим в отдельной статье. Здесь же приведем простейший пример использования Servo.
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
#include Servo servo; // Создаем объект void setup() { servo.attach(9); // Указываем объекту класса Servo, что серво присоединен к пину 9 servo1.write(0); // Выставляем начальное положение } void loop() { servo.write(90); // Поворачиваем серво на 90 градусов delay(1000); servo.write(1800); delay(100); servo.write(90); delay(1000); servo.write(0); delay(1000); }
Скетч для двух сервпоприводов
А в этом примере мы работаем сразу с двумя сервоприводами:
#include Servo servo1; // Первый сервопривод Servo servo2; // Второй сервопривод void setup() { servo1.attach(9); // Указваем объекту класса Servo, что серво присоединен к пину 9 servo2.attach(10); // А этот servo присоединен к 10 пину } void loop() { // Выставялем положения servo1.write(0); servo2.write(180); delay(20); // Меняем положения servo2.write(0); servo1.write(180); }
Управление сервоприводом с помощью потенциометра
В этом примере поворачиваем серво в зависимости от значения, полученное от потенциометра. Считываем значение и преобразовываем его в угол с помощи функции map:
//Фрагмент стандартного примера использования библиотеки Servo void loop() { val = analogRead(A0); // Считываем значение с пина, к которому подключен потенциометр val = map(val, 0, 1023, 0, 180); // Преобразуем число в диапазоне от 0 до 1023 в новый диапазон — от 0 до 180. servo.write(val); delay(15); }
Учимся управлять серводвигателями через джойстики при помощи Arduino
Процесс сборки самоделки:
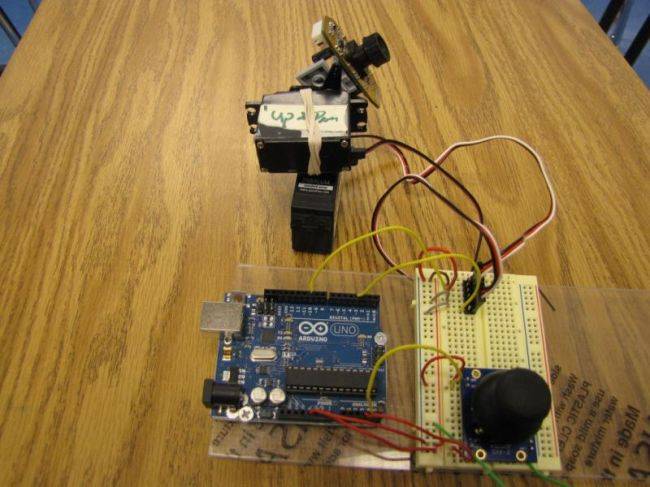
Шаг первый. Подключаем серводвигателиПроцесс сборки самоделки начинается с подключения серводвигателей. Для того чтобы собрать предварительный макет, применяется монтажная плата. Потом можно будет сделать отдельный шилд. На рисунке можно увидеть, как именно все подключается.
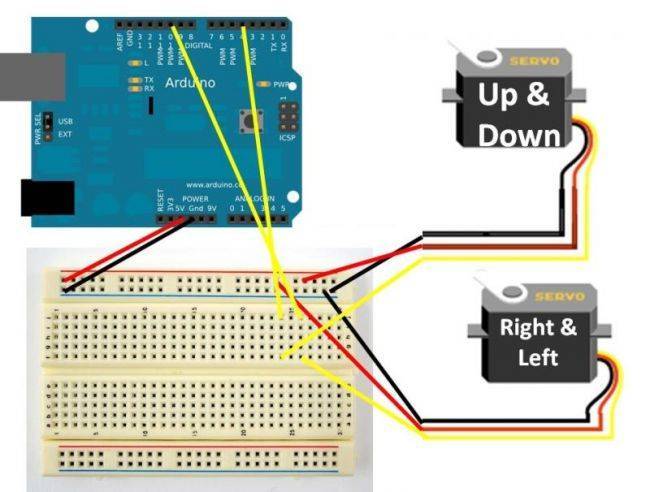
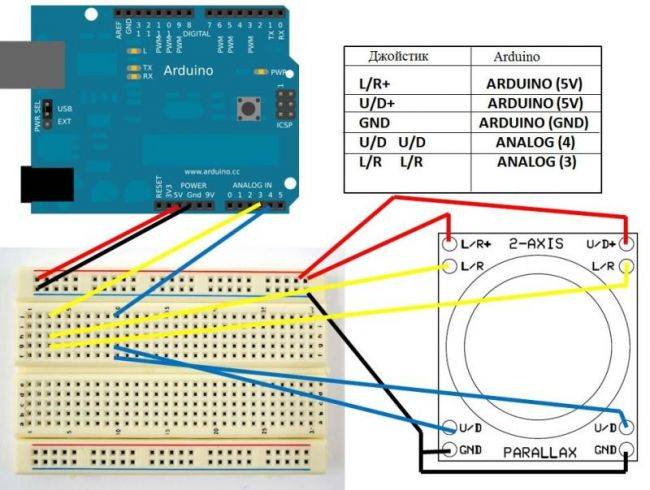
1. На модуле джойстика можно найти выходы U/R+ и L/R+. Через эти выходы происходит подключение питания. Соответственно сюда нужно подать напряжение +5V от соответствующего пина на Arduino.
2. Еще на джойстике присутствует два разъема под названием L/R и два разъема U/D. Их нужно подключить к аналоговым выходам А3 и А4.
3. Ну и в заключении землю на джойстике нужно соединить с землей на Arduino.
После сборки подключение нужно перепроверить. Именно из-за ошибок подключения в большинстве случаев возникают проблемы. Особенно это касается случаев, когда используется монтажная плата и на ней находится много подключений.
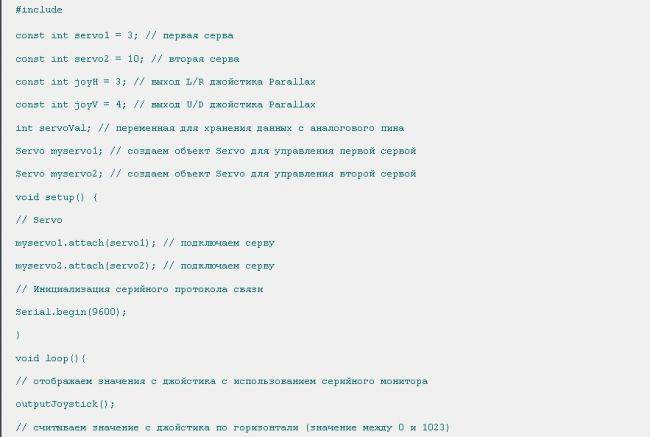
Шаг третий. Скетч для ArduinoКод очень простой и в нем присутствуют подробные комментарии. Приведенный код нужно просто скопировать в Arduino IDE. После того как код будет загружен, двигатели не должны двигаться. Они должны начинать двигаться только при нажатии кнопки на джойстике.
Проблемы, которые могут возникнуть и способы их решения1. Если двигатели не включаются, нужно перепроверить подключение. Для подключения двигателей используются выходы типа ШИМ, а для подключения джойстиков применяются аналоговые выходы.
2. Бывает такое, что сразу после загрузки кода двигатели начинают вибрировать. Такое бывает если неправильно подключить пины U/D+ L/R+. Подключение нужно тщательно проверить. Чтобы не сжечь плату во время проверки, ее нужно обязательно отключить от компьютера.
3. Если все перепроверено, но двигатели все равно не хотят работать, можно попробовать переподключить джойстик. Его нужно снять с монтажной платы, а затем установить назад с некоторым усилием. Коннекторы джойстика должны хорошо войти в макетку.
Если все вышло, теперь можно приступать к созданию каких-либо самоделок с управлением через джойстик. К примеру, можно сделать робота, которым можно будет управлять с помощью джойстика, и многое другое.
Виды сервоприводов
Сервоприводы бывают аналоговые и цифровые. Различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостаток — дороговизна.



![Сервоприводы pdm постоянного вращения: особенности применения и примеры кода [амперка / вики]](https://movai.ru/wp-content/uploads/d/3/9/d3943dece57eda0627b5318e9696dcca.jpeg)
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. У бесколлекторных моторов нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Принцип работы цифровой конструкции
Слуга линейного движения: что это такое? Фактически указанное устройство представляет собой регулятор с обратной связью. Сегодня модели пользуются большим спросом. Они идеально подходят для различных систем отопления. Содержащиеся в них преобразователи часто используются на три контакта. Ящики статора устанавливаются разной мощности. Двигатели могут использоваться только синхронного типа.
В противном случае блоки питания не выдержат предельного напряжения. В этой ситуации редукторы используются как единое целое. Шестерни используются для передачи крутящего момента от двигателя. Да, сегодня на рынке много модификаций с выходным валом. В этом случае скорость оборотов можно регулировать с помощью контроллера.
Несколько лет назад все сервоприводы были аналоговыми. Теперь появился и цифровой дизайн. В чем разница между их работами? Перейдем к информации официального характера.
Последний этап развития — появление цифрового устройства. Эти агрегаты также имеют значительные преимущества перед коллекторными двигателями. Однако есть и недостатки.
Внешне аналоговые и цифровые устройства ничем не отличаются. Различия фиксируются только на карточках устройств. Вместо микросхемы на цифровом блоке можно увидеть микропроцессор, анализирующий сигнал с приемника. Он проверяет двигатель.
совершенно неправильно говорить, что аналоговые и цифровые модификации принципиально отличаются в работе. У них могут быть одинаковые двигатели, механизмы и потенциометры
Итак, становится ясно, слуга, что это?
#22. Подключаем к Arduino джойстик. Управление servo сервоприводом.
Сегодня в уроке подключим джойстик к Arduino UNO. И рассмотрим пару примеров использования джойстика в робототехнике:
- Вывод данных о положении стика джойстика в монитор порта.
- Управление свечением двух светодиодов с помощью джойстика.
- Подключить джойстик и сервопривод к Arduino. Научимся управлять сервоприводами с помощью джойстика.
А для начала рассмотрим, что такое джойстик, из чего он состоит и как устроен.
Устройство аналогово джойстика и принцип работы.
Джойстик представляет из себя модуль, на который установлены 2 потенциометра и одна тактовая кнопка.
Управляет всем стик. При изменении положения стика по оси X — вращается потенциометр, выход которого outX, а при перемещении по оси Y — меняется значение потенциометра с выводом outY. По сути, это 2 потенциометра, с которых снимаем показания. Стик устроен таким образом, что он возвращается самостоятельно в центральное положение. Что обеспечивает центрование потенциометров. В данном состоянии джойстика на выходах outX, outY будет 511.
Но на практике это значение может быть другим, оно зависит от точности сборки, качества потенциометров и прочих факторов. Подробнее данную ситуацию рассмотрим на примере.
На плате установлена тактовая кнопка. Использовать ее или нет решать вам. При создании пульта для радиоуправляемой машинки я использовал данную кнопку для переключения режима работы: с джойстика или с акселерометра. Если интересно читайте на странице проекта: Машинка на радиоуправлении. Arduino + nrf24l01 + пульт.
Вывод данных о положении стика джойстика в монитор порта.
Для того, чтобы определить какие значения получает Arduino, когда мы отпустили стик джойстика и он установил свое центральное положение, выведем показания в монитор порта. Для этого подключим джойстик к Arduino UNO по схеме.
После чего нужно загрузить код в Arduino UNO.
В мониторе порта будут вот такие данные.
Как видите, они отличаются от 511. Показание отличаются на разных осях X=507, Y=510. Эти данные нам пригодятся в следующем примере.
Если мы подвигаем стик джойстика, то увидим изменение значений от 0 до 1023 по каждой оси.
На выходе мы получаем значение до 1023. Данный диапазон значений практически не применим в проектах на Ардуино, поэтому давайте приведем это значение к диапазону от 0 до 255, для этого воспользуемся функцией map() .
После чего в мониторе порта мы получим вот такие значения.
Управление свечением двух светодиодов с помощью джойстика.
Чтобы усложнить ситуацию, сделаем так, чтобы светодиод не светился при центральном положении джойстика, а при отклонении джойстика светодиод плавно увеличивал яркость. Для этого нужно подключать светодиоды к пинам с ШИМ. Подключим джойстик и светодиоды к Ардуино по схеме.



Так как мы знаем значение при центральном положении стика, для оси Х это 507, а для оси Y 510, используя функцию map() , приведем к необходимому диапазону, например для оси Х от 507 до 1023 к диапазону от 0 до 255. Код будет вот таким.
Данный пример применим при разработке пульта радиоуправления.
Сервоприводы MG995 и MG996 tower pro
Серво MG995 является второй по популярности моделью сервоприводов, чаще всего подключаемых к проектам Arduino. Это относительно недорогие сервомоторы, обладающие гораздо лучшими характеристиками по сравнению с SG90.
Характеристики MG995
Выходной вал у MG995 поворачивается на 120 градусов (по 60 в каждом направлении), хотя многие продавцы указывают на 180 градусов. Устройство выполняется в пластиковом корпусе.
- Вес 55 г;
- Крутящий момент 8,5 кг х см;
- Скорость 0,2с/60 градусов (при 4,8В);
- Рабочее питание 4,8 – 7,2В;
- Рабочие температуры – от 0С до -55С.
Описание MG995
Подключение к ардуино также происходит по трем проводам. В принципе, для любительских проектов допускается подключение MG995 напрямую к Arduino, но ток двигателя всегда будет создавать опасную нагрузку для входов платы, поэтому рекомендуется все-таки запитывать серво отдельно, не забыв соединить землю обоих контуров питания. Другим упрощающим жизнь вариантом будет использование готовых сервоконтроллеров и шилдов, обзор которых мы подготовим в отдельной статье.
MG996R похож на MG995 по своим характеристикам, только он выполняется в металлическом корпусе.
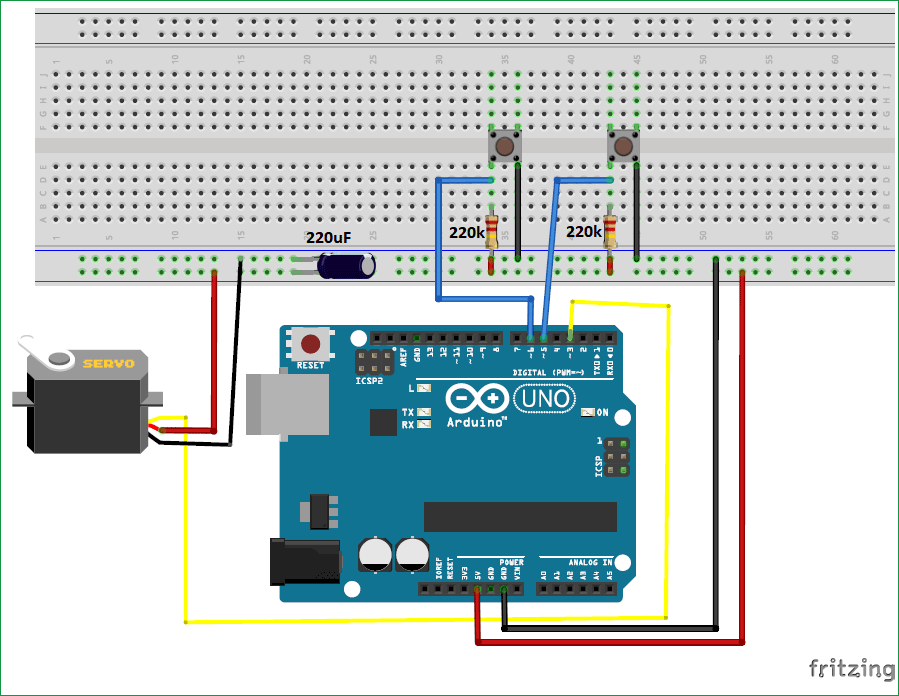
Работа схемы и программы
Схема устройства представлена на следующем рисунке.
В отличие от управления серводвигателем с помощью микроконтроллеров AVR в случае использования платы Arduino нам уже нет необходимости вручную устанавливать значения регистров чтобы получить нужную частоту и коэффициент заполнения управляющих сигналов для серводвигателя. Для платформы Arduino для этих целей разработаны специальные библиотеки, с помощью которых эти функции реализуются достаточно просто – необходимо в программе просто подключить заголовочные файлы этих библиотек. В этом случае мы достаточно просто сможем устанавливать позицию сервомотора с помощью сигналов ШИМ.
Для задействования всей мощи библиотек Arduino по управлению серводвигателями мы должны сделать следующие вещи:
1. #include 2. Servo sg90servo; 3. Sg90.attach(servo_signal_pin_attached_to); 4. Sg90.write(needed_position_ angle);
Вначале мы должны установить частоту ШИМ сигнала для управления сервомотором – в данном случае это делается простым подключением заголовочного файла “#include ”. С подключением этого заголовочного файла необходимая частота ШИМ сигнала для управления серводвигателем устанавливается автоматически, кроме этого открываются возможности использования различных функций для простого управления серводвигателем.
После этого мы должны определиться с именем сервомотора, которым будем управлять в программе. Делается это с помощью функции “Servo sg90sevo”, где ‘sg90servo’ – это выбранное имя для нашего сервомотора. Особенно актуально указание имен сервомоторов когда под нашим управлением будет находиться несколько сервомоторов (до 8 для Arduino) – в этом случае удобно их будет различать по данным им именам.
Далее мы должны сообщить Arduino к какому контакту подключен сервомотор, то есть на каком контакте необходимо будет формировать сигнал ШИМ. Мы это будем делать с помощью функции “Sg90.attach(3);”, которая указывает Arduino что сервомотор подключен к контакту PIN3.
Теперь все, что осталось сделать, это указать на какой угол необходимо повернуть ось серводвигателя, это можно сделать с помощью функции “Sg90.write(30);”, которая повернет ось серводвигателя на 30 градусов. В дальнейшем, если нам понадобится повернуть ось серводвигателя на какой-нибудь другой угол, то необходимо воспользоваться командой ”Sg90.write(needed_position_ angle);”. На представленной схеме у нас есть две кнопки, одна из них будет увеличивать угол поворота оси серводвигателя (вращать его против часовой стрелки), а другая – уменьшать (вращать его по часовой стрелке).
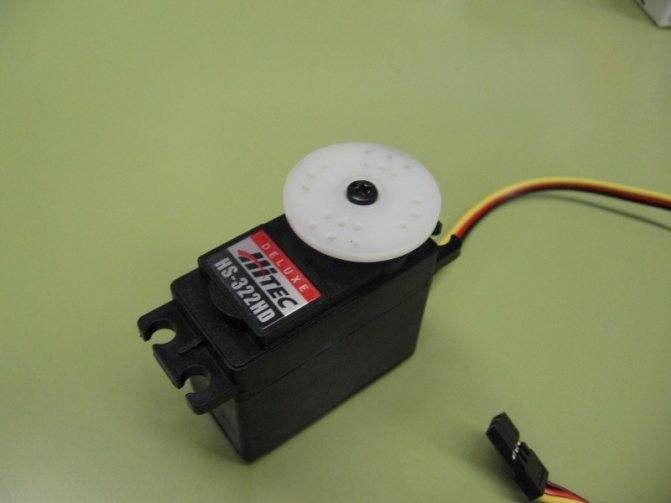
Устройство серводвигателя
В общем случае у него следующие функциональные узлы:
- Сам привод – мотор, превращающий электрическую энергию в механическую (силу поворота); для снижения скорости до необходимой снабжен редуктором, передающим крутящий момент.
- Энкодер – датчик обратной связи, преобразующий угол поворота в управляющий сигнал, контролирующий вращение выходного вала (на последнем закреплен инструмент или какой-то другой орган выполнения действия). Для решения данной задачи также хорошо подходит потенциометр, изменяющий свое сопротивление при перемещении бегунка, причем именно пропорционально, и за счет этого обеспечивающий точное позиционирование.
- Электронная начинка, принимающая входящие параметры, считывающая и сравнивающая значения, выполняющая операции включения/выключения – это тоже то, из чего состоит сервопривод; все ЭРЕ располагаются на печатной плате, которая и помогает поддерживать обратную связь и, по сути, является важнейшей частью двигателя.
- Проводка – подключение питания (два кабеля) и доставка сигнала контроля (еще один), обеспечивающий выставление правильного положения вала, а значит и используемого инструмента.
Данная конфигурация достаточно проста, чтобы обеспечивать бесперебойное поддержание режимов и оставаться надежной. Такого узла, который стал бы «слабым звеном», попросту нет, поэтому проблемы с эксплуатацией возникают сравнительно редко. Продолжительности ресурса также способствует специфика функционирования, к особенностям которой мы переходим.
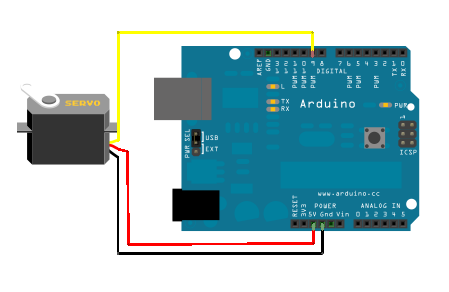
Подключение серводвигателя к ардуино
Сервопривод имеет три контакта, которые имеют разную окраску. Коричневый провод ведет к массе, красный провод к источнику питания + 5В, оранжевый или желтый провод — сигнальный. Устройство подключается к Arduino через макетную плату, как показано на рисунке. Оранжевый (сигнальный) провод подключается к цифровому, черному и красному контактам, соответственно, к заземлению и питанию. Для управления серводвигателем нет необходимости подключаться к выводам ШИМ: принцип работы сервомотора мы уже описали ранее.
Не рекомендуется подключать мощные сервоприводы напрямую к плате, так как они создают ток для цепи питания Arduino, несовместимый с жизнью — повезло, если защита сработает. Наиболее частыми симптомами перегрузки сервопривода и неправильного питания являются рывки сервопривода, неприятный звук и перезагрузка платы. Для питания лучше использовать внешние источники, обязательно совмещая мотивы двух схем.
Принцип работы сервопривода
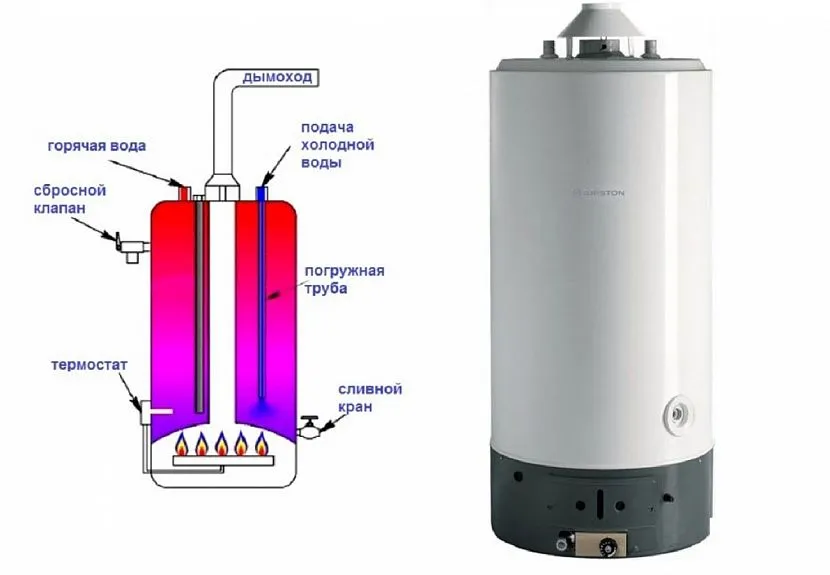
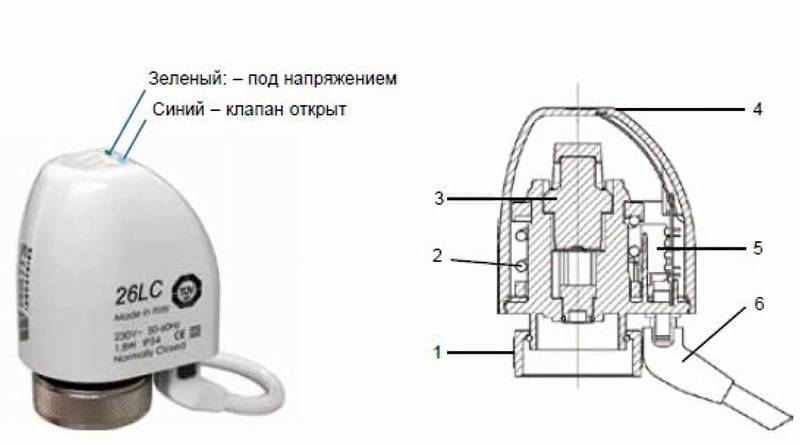
Через нихромовый нагревательный элемент проходит электрический ток за счет чего происходит расширение жидкости (толуола) в сильфоне. Именно из этого состоит принцип действия сервопривода для теплого пола. Сервопривод для теплого пола состоит из пружинного механизма и емкости, в которую помещена специальная жидкость. Эта жидкость под воздействием температуры расширяется и оказывает воздействие на шток, который выдвигается и давит на шток термоклапана. Клапан автоматически оказывается закрыт. Под воздействием напряжения происходит нагрев и расширение жидкости. То есть у данного сервопривода отсутствует электромагнитный мотор. Использованная сила происходит от расширения жидкости под действием температуры. Такой привод называется термоприводом. Поэтому при подаче напряжения на сервопривод клапан закрывается только через некоторый промежуток времени, потраченный на прогрев жидкости. Данное время варьируется от 1 до 3 минут.
При отсутствии напряжения сервопривод остынет и клапан вернется к исходному положению. Остывание аппарата занимает времени намного дольше, чем его нагрев.
Существуют сервоприводы для теплого пола, не имеющие жидкости для расширения. Механизм такого привода состоит в перемещении штока за счет нагревания компенсационного термоэлемента. Термоэлемент представляет собой пластину или пружину, изменяющую при нагреве свое положение.
Сверху у сервопривода расположен выдвигающийся механизм, который необходим для следующего. Он определяет посадку привода в термоклапане и показывает режим клапана: Вкл./Выкл.
Сервопривод для теплого пола имееет защиту от перегрева и встроенный механизм отключения питания. Данные приводы подключаются на термостатический клапан коллектора или отдельный термостатический клапан.
Устройство и принцип работы сервомоторов
Основным рабочим элементом сервопривода является сильфон. Т.е. такая же деталь, как и в трехходовом клапане. Небольшой по размерам, герметичный цилиндр с эластичным корпусом заполнен веществом, чутко реагирующим на температуру. В зависимости от того, происходит повышение или понижение температуры, происходит соответственно изменение объема вещества. Рисунок – схема наглядно демонстрирует устройство сервомотора, где основным местом занимает сильфон.
Сильфон находится в тесном контакте с электрическим нагревательным элементом. Получая сигнал с термостата, нагревательный элемент включается от сети и включается в работу. Внутри сильфона вещество подогревается и увеличивается в объеме. Таким образом, увеличившийся в размерах цилиндр начинает давить на шток, меняя его положение и перекрывая путь потоку теплоносителя. Оценивая работу сервопривода можно сделать вывод – прибор не оснащен никакими моторами, в нем нет никаких шестерней и передаточных звеньев. Обычная рабочая связь «тепловая энергия и электричество». Отсюда и распространенное название приборов, термоэлектрические регуляторы.
Для того, что бы клапан снова стал открытым, весь процесс повторяется только в обратном направлении. Отсутствие электропитания приводит к тому, что нагревательный элемент перестает работать. Следовательно, вещество внутри цилиндра остывает, уменьшаясь в объеме. Давление на шток уменьшается, он подымается, действуя на клапан, а, следовательно, открывается доступ горячей воды в систему.
Ознакомившись с принципом работы устройства, важно помнить, что для механического действия клапана необходимо определенное время. Несмотря на то, что при поступлении сигнала с термостата, нагревательный элемент начинает нагревать вещество внутри цилиндра. Время, необходимое на изменения физического состояния жидкости, составляет 2-3 минуты, поэтому клапан приводится в действие не сразу
В отличие от нагрева, остывание жидкости проходит медленнее
На обратный процесс, т.е. на закрытие клапана потребуется уже не 2-3 минуты, а 10-15 минут. При перегреве каждый сервомотор должен автоматически отключаться. Для этого в конструкции предусмотрен механизм аварийного отключения
В отличие от нагрева, остывание жидкости проходит медленнее. На обратный процесс, т.е. на закрытие клапана потребуется уже не 2-3 минуты, а 10-15 минут. При перегреве каждый сервомотор должен автоматически отключаться. Для этого в конструкции предусмотрен механизм аварийного отключения.
Для примера: используемые в работе коллекторной группы сервоприводы не все оснащаются цилиндрами и баллонами с веществом. Ест модели, в которых эту роль играют термоэлементы, напоминающие собой пружину или пластину, которые под действием все того же нагревательного элемента нагреваются. Расширяясь, эти детали воздействуют опять же, на шток, приводя в конечном итоге в рабочее состояние клапан. Определить в каком положении находится клапан, можно по изменению внешнего вида сервопривода. Выдвигающийся элемент сигнализирует о работе прибора. Если этого не происходит, значит, ваш прибор неправильно подключен или система отопления работает с перебоями.
Как устроен сервопривод
Обычный сервопривод для теплого пола по принципу «включил-выключил» чаще сделан на основе емкости с расширяющейся жидкостью, толуола. При подаче напряжения емкость подогревается спиралью, жидкость расширяется и давит на шток. При отключении объем жидкости уменьшается, происходит возврат в первоначальное положение.
Также возможен вариант конструкции с нагревающейся пластиной, но принцип тот же — при нагреве происходит выдвижение штока. Эти конструкции сервоприводов просты, в них отсутствует электромагнитный движитель и вращение штока, их часто называют также «теплоприводами».




Выдвижение штока будет происходить с задержкой на 1 — 3 минуты, после подачи напряжения как и его возврат после отключения. Но нас интересует, что будет происходить в самой системе при включении и выключении сервопривода, т.е. необходимо рассматривать как ведет себя при этом управляемый клапан…
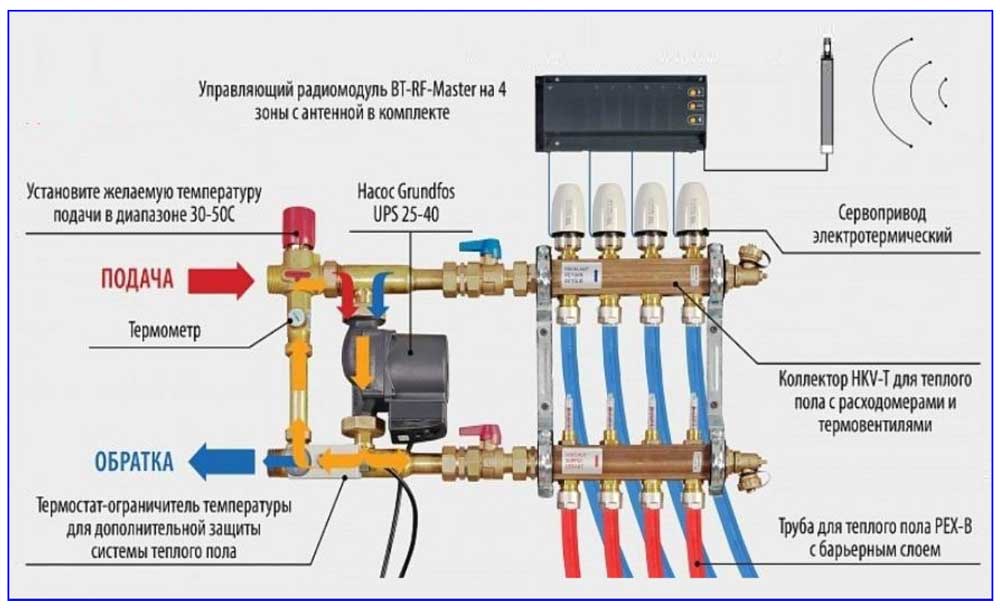
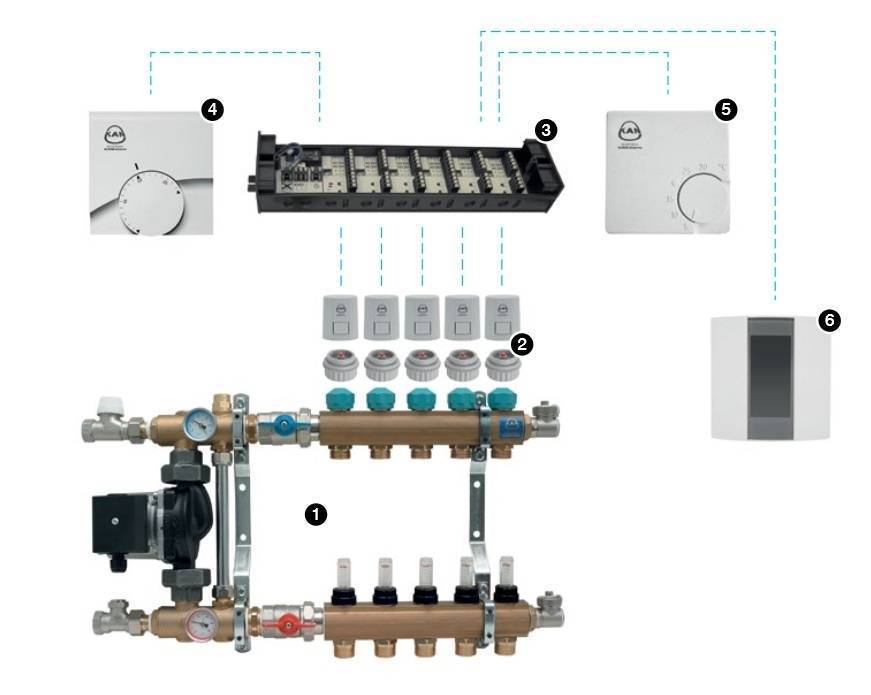
Инструкция по сборке и монтажу
Самостоятельная сборка распределительной гребёнки вполне возможна, так как все изделия заводского изготовления всегда полностью комплектны и сопровождаются интуитивно понятной инструкцией.
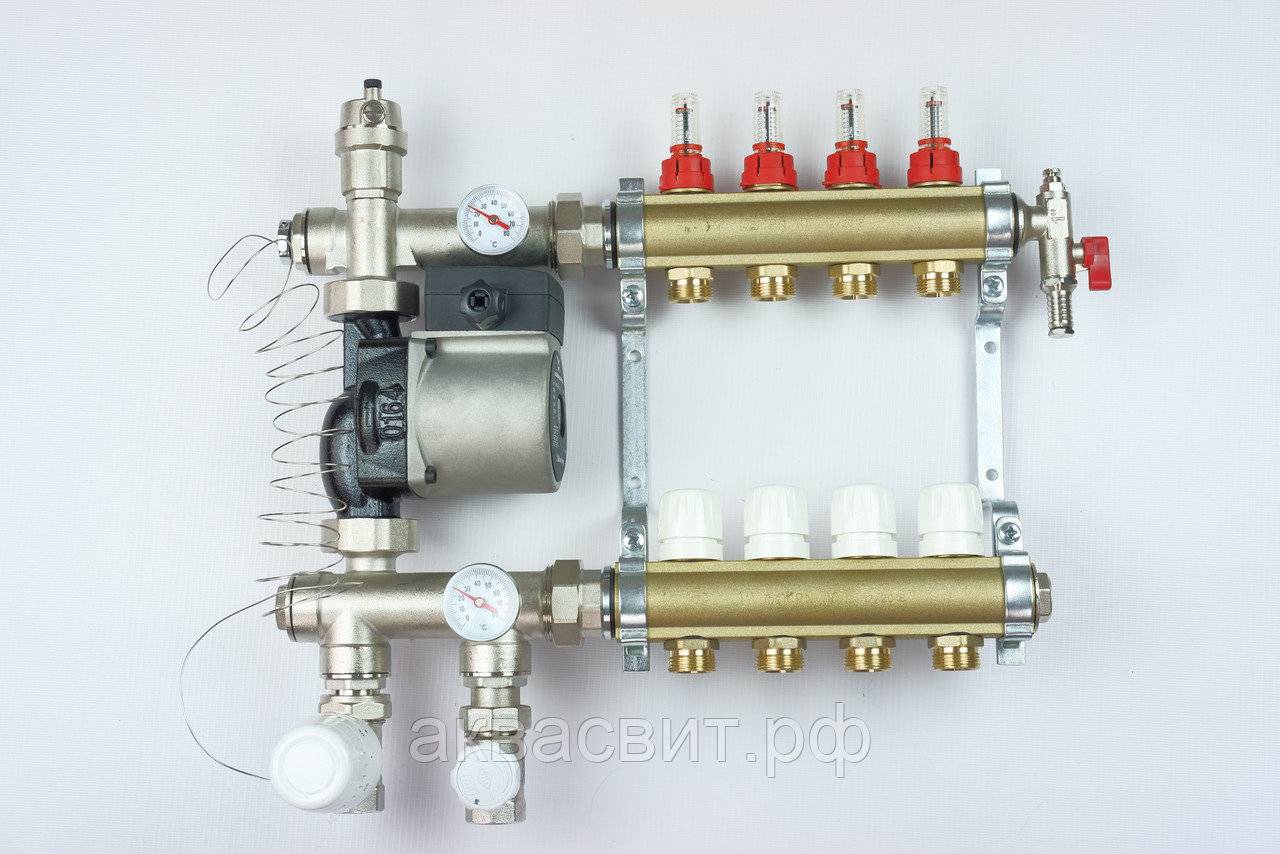
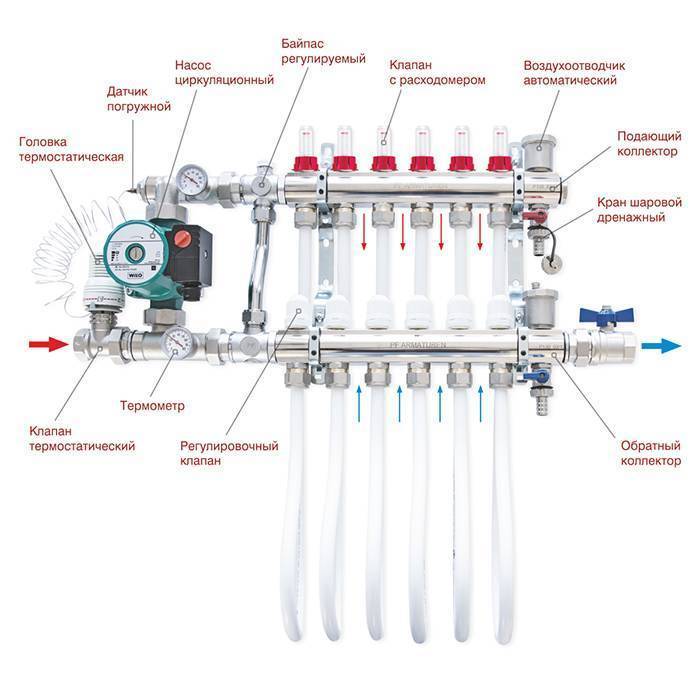
Стандартная комплектация коллектора для обустройства системы «тёплый пол» представлена:
- металлическим шкафом;
- термометром;
- сливным краном с пробкой;
- автоматическим воздухоотводчиком для каждой ветки;
- арматурой;
- термостатическими вентилями;
- расходомерами.
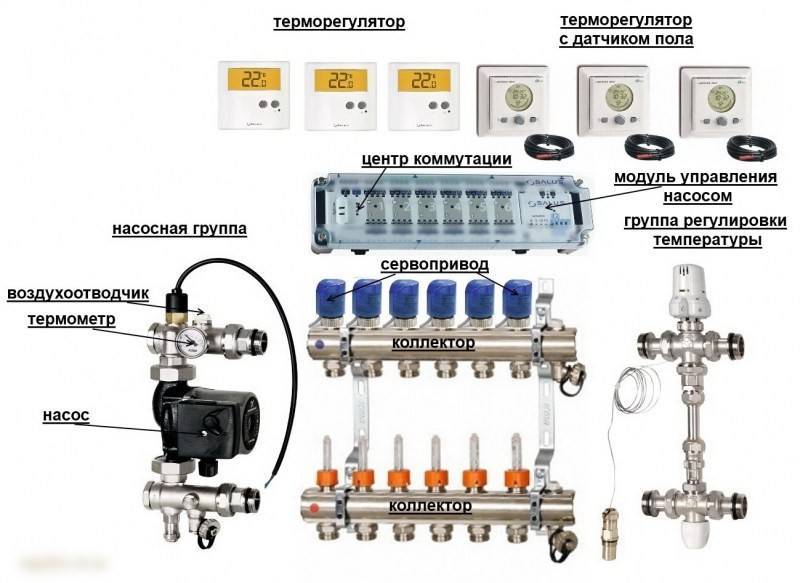
Контроль температурного режима выполняют термостатические вентиляторы, настройка которых может быть ручной или полностью автоматической. Второй вариант более удобный и практичный, что сказывается на общей стоимости оборудования.
Необходимые инструменты
Для самостоятельной сборки заводского изделия необходимо подготовить стандартный набор инструментов, а также традиционную паклю или ФУМ-ленту для получения максимально надёжного соединения всех элементов. Дополнительно может использоваться специальная смазка, увеличивающая качественные показатели скрутки на резьбовых соединениях.
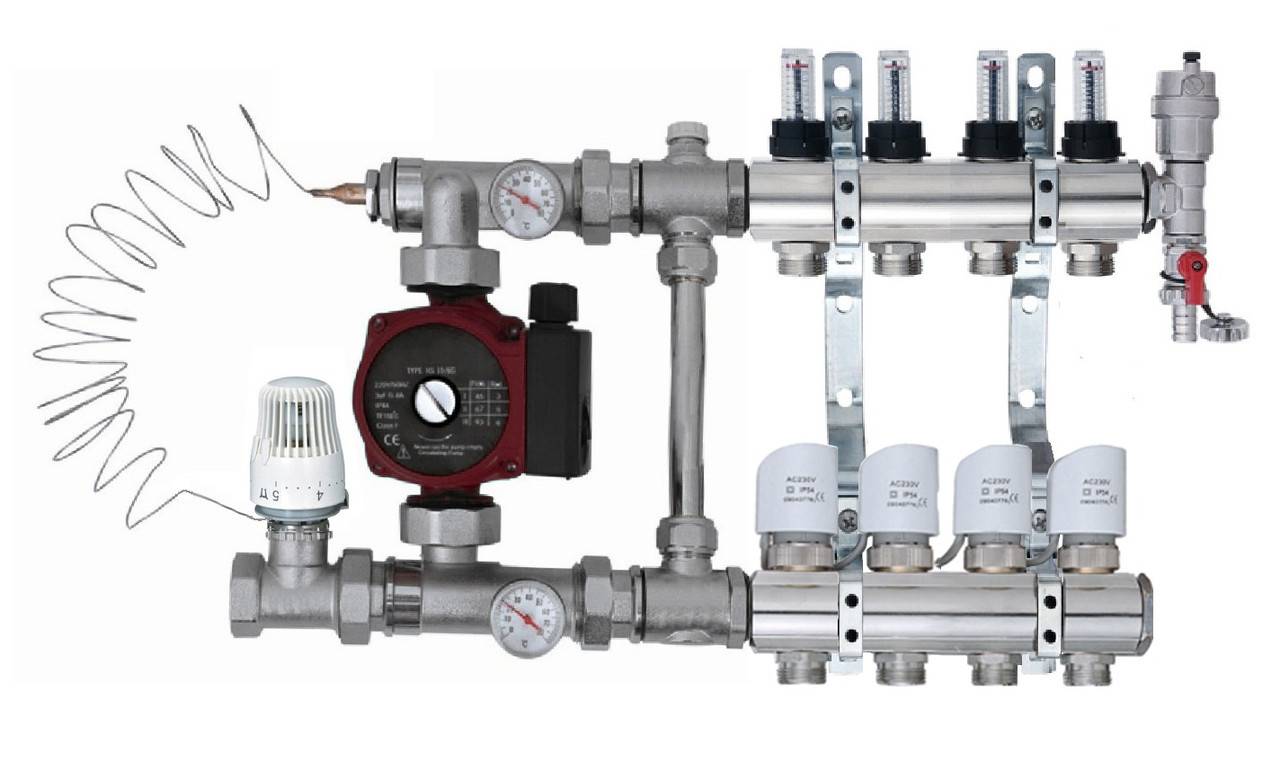
Сборка фабричной гребёнки
Для сборки коллектора фабричного производства необходимо выполнить следующие шаги:
- После того как будет распакована коробка, необходимо проверить комплектацию и убедиться в целостности всех элементов.



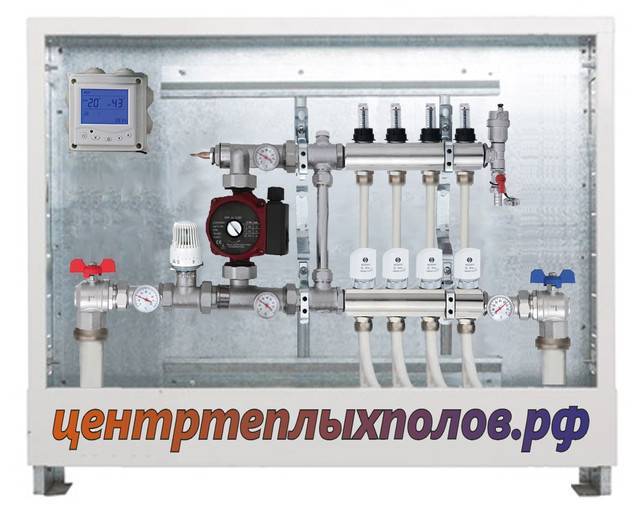
Монтаж приспособления
Монтаж агрегата включает следующие этапы:
- Для самостоятельного монтажа гребёнки в систему «тёплый пол» необходимо распаковать крепёжные кронштейны и убедиться в полной комплектности.



Обзор популярных моделей сервоприводов
Сервоприводы для водяного теплого пола выпускаются разными производителями. Каждая модель имеет свои особенности.
Сервопривод для отопления
VALTEC
VALTEC – это производитель приборов для устройства водо- и теплоснабжения для дома. Над созданием продукции совместно работает группа из российских и итальянских специалистов. VALTEC выпускают следующие приводы для обеспечения регулировки работы отопительной системы напольного типа:
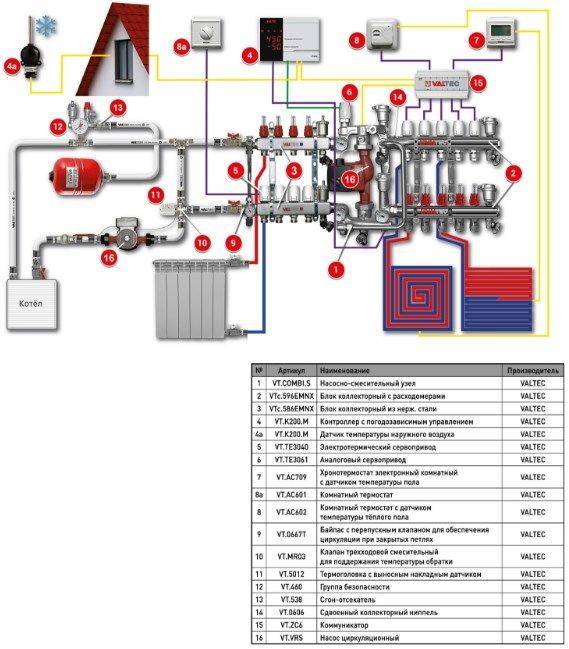
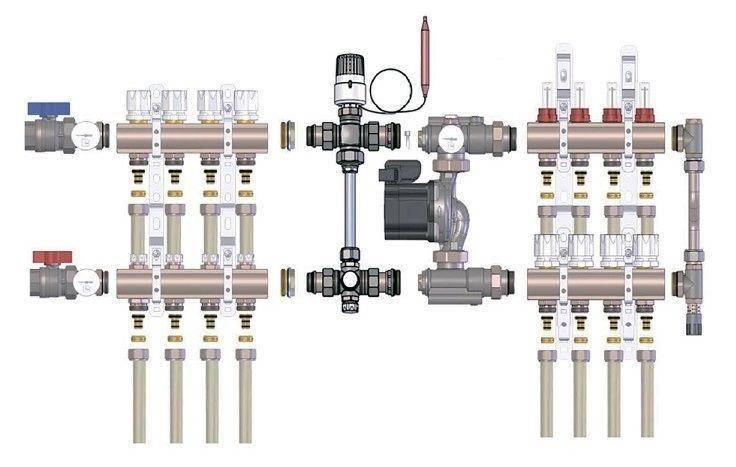
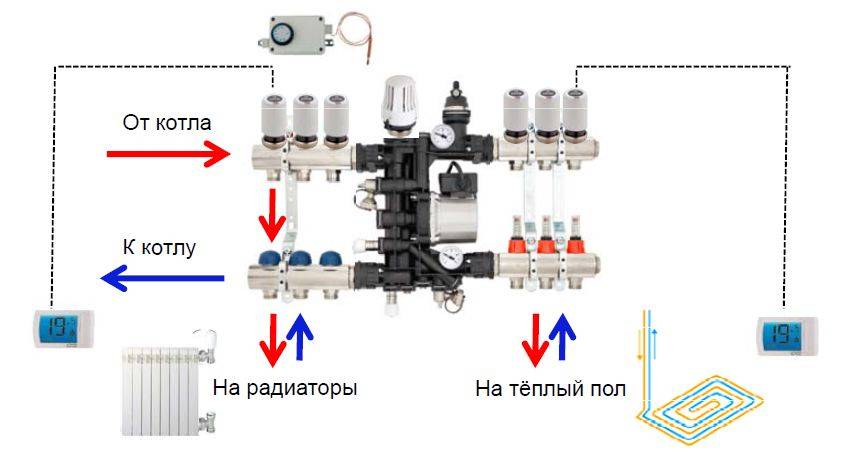
Комбинированная система отопления VALTEC
- TE3042.A. Относится к группе нормально открытых. Предназначены для управления клапанами климатических систем по командам, которые будет задавать термостат, контроллер или ручной переключатель. Мощность устройства – 2 Вт, сечение проводника – 0,75 кв. мм. Присоединительный размер составляет М30х1,5;
- TE3061.0. Это электротермический прибор нормально закрытый. Предназначен для трехходовых клапанов. Работа устройства возможна благодаря температурному расширению жидкости – толуола. Мощность привода – 2 Вт, сечение проводников – 0,22 кв. мм;
- TE3041A.0. Устройство работает благодаря наличию в корпусе жидкости, которая расширяется под воздействием температуры. Относится к группе нормально открытых. Подключение к клапану происходит через переходник, который входит в комплект. Мощность агрегата – 1,8 Вт, сечение проводников – 0,75 кв. мм.
Watts
Watts – это ведущий мировой производитель отопительной техники разного формата. Отличается высоким качеством, демократичной ценой и эффективностью. Сервоприводы от Watts – это модели с электромагнитным двигателем. Популярные серии:
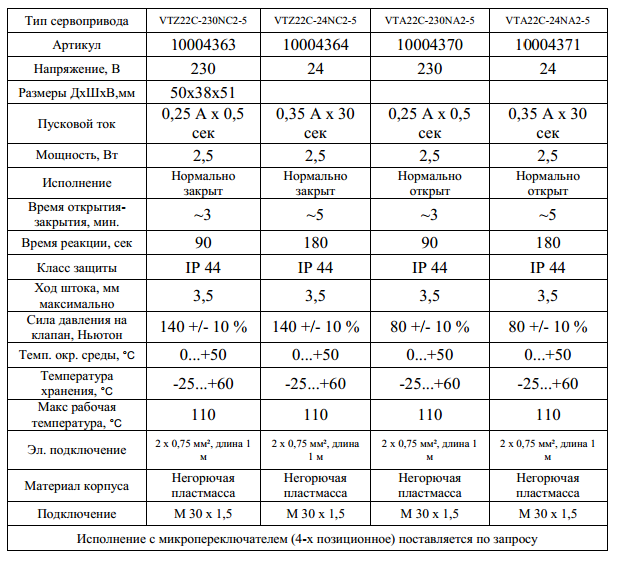
Технические характеристики электротермического сервопривода WATTS
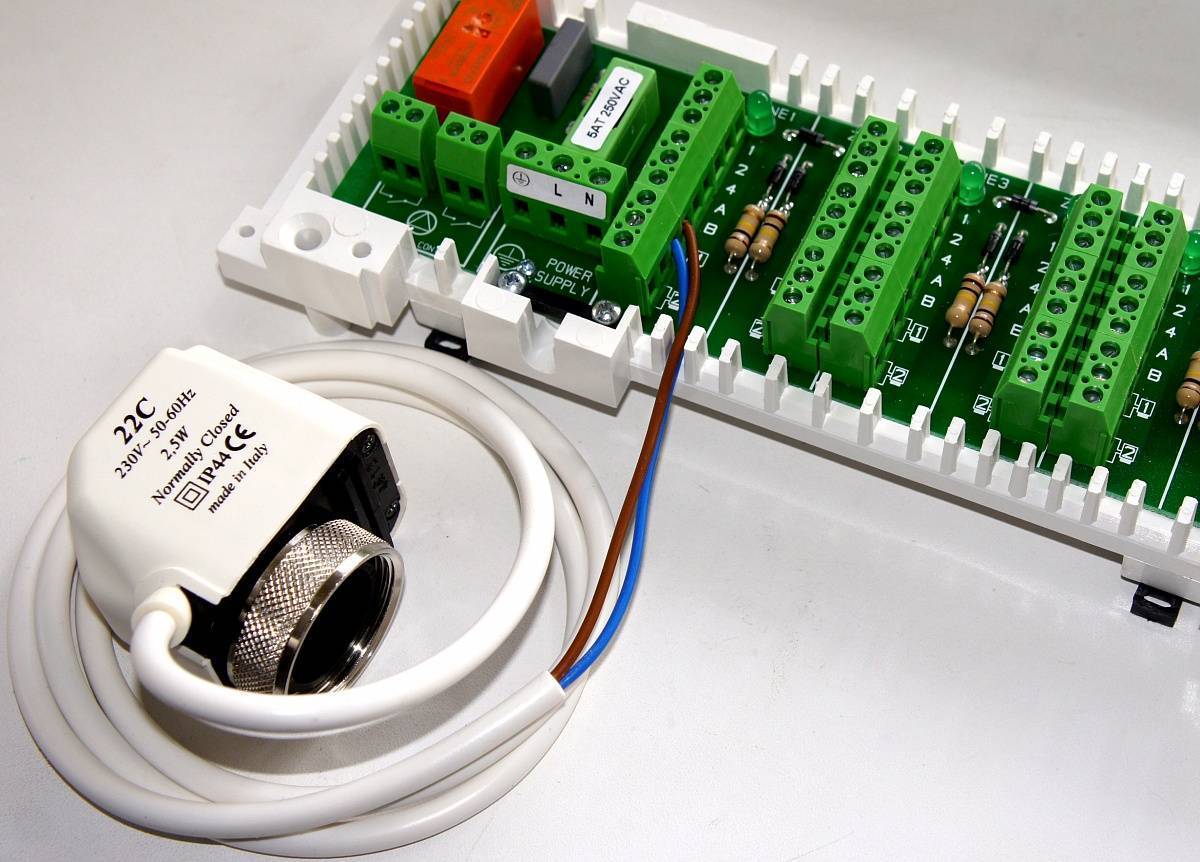
- 22С. Устанавливается на вентиле обратного трубопровода и регулирует подачу теплоносителя в систему напольного отопления. Мощность составляет 2,5 Вт. В зависимости от модели в серию 22С входят устройства нормально открытые и закрытые. Класс защиты – IP44;
- 22СХ. Относятся к электротермическим приборам для обеспечения эффективной работы водяного теплого пола. Существуют модели нормально закрытые и открытые. Уровень потребляемой мощности в нормальном режиме работы – 1,8 Вт. Рабочая температура жидкости в системе – +110°С;
- 26LC. Электротермические приводы для коллектора. На корпусе размещается светодиодный индикатор, который указывает на его режим работы. Если загорается зеленый – на привод подается напряжение, синий – прибор открыт.
REHAU
Приводы для регулировки работы водяного теплого пола от немецкого производителя. Сочетают в себе инновационные разработки и проверенное годами качество. Самые популярные модели от REHAU:
- UNI на 230, 24 В. Монтаж устройства происходит на вентилях коллекторной группы при помощи специального адаптера. Относится к приборам нормально закрытым. Контроль над работой привода осуществляется через индикатор. Присоединительные кабели сечением 2х0,5 кв. мм;
- привод 230, 24 В. В обесточенном состоянии вентиля находится в закрытом состоянии. Для контроля функционирования устройства на корпусе размещается световой индикатор.
Таблица характеристики сервоприводов Rehau
LUXOR
Итальянская компания LUXOR специализируется на производстве водозапорной арматуры и систем для регулировки температуры отопительной системы для дома. В составе устанавливаемой коллекторной группы будет присутствовать привод SM 1347. Он предназначен для регулирования температуры подаваемого теплоносителя для теплого водяного пола. Основные технические характеристики прибора:
- питание – 24 В;
Коллекторная группа системы отопления и теплого пола Luxor
- работа устройство обеспечивается шаговым двигателем. Его управление – электронное;
- на корпусе присутствует светодиодная индикация, которая указывает на режим работы;
- монтаж происходит в прямом положении – вертикальном или горизонтальном;
- максимальная температура в системе – +100°С;
- кабель длиною 1,5 м;
- температура хранения прибора – от 0 до +50°С;
- корпус изготовлен из синтетических материалов. Его цвет – серый;
- наличие гарантии – 2 года.
Независимо от выбранной модели, монтаж сервопривода и его эксплуатация должна проходить в соответствии с рекомендациями от производителя. С ними можно ознакомиться в инструкции к прибору. После установки привода и всех элементов системы приступают к их использованию после полного тестирования.