

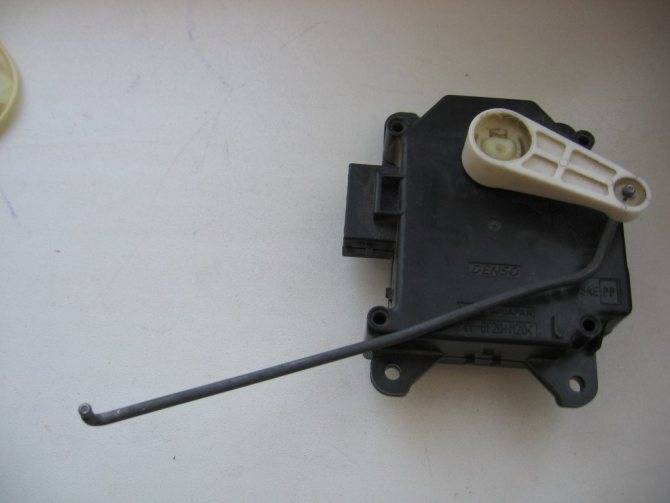
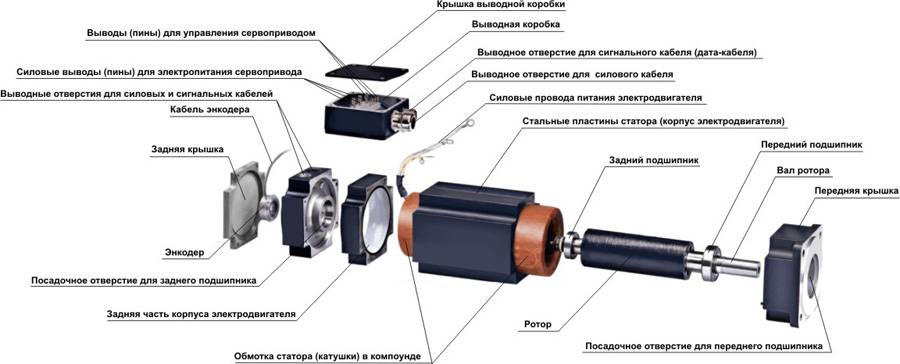
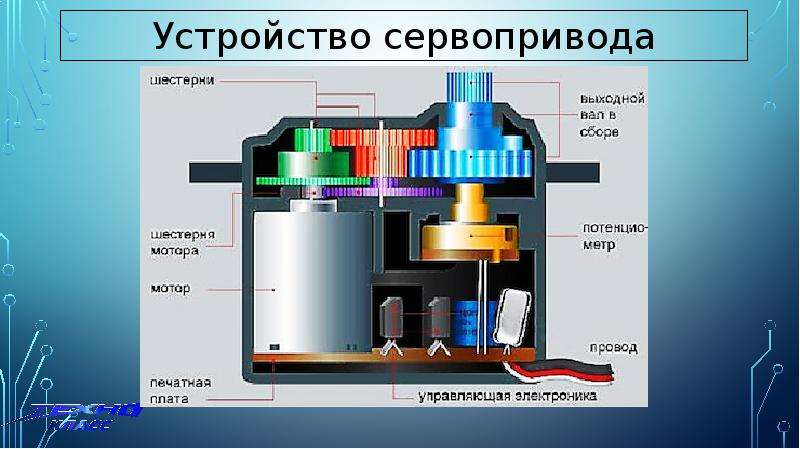
Устройство серводвигателя
В общем случае у него следующие функциональные узлы:
- Сам привод – мотор, превращающий электрическую энергию в механическую (силу поворота); для снижения скорости до необходимой снабжен редуктором, передающим крутящий момент.
- Энкодер – датчик обратной связи, преобразующий угол поворота в управляющий сигнал, контролирующий вращение выходного вала (на последнем закреплен инструмент или какой-то другой орган выполнения действия). Для решения данной задачи также хорошо подходит потенциометр, изменяющий свое сопротивление при перемещении бегунка, причем именно пропорционально, и за счет этого обеспечивающий точное позиционирование.
- Электронная начинка, принимающая входящие параметры, считывающая и сравнивающая значения, выполняющая операции включения/выключения – это тоже то, из чего состоит сервопривод; все ЭРЕ располагаются на печатной плате, которая и помогает поддерживать обратную связь и, по сути, является важнейшей частью двигателя.
- Проводка – подключение питания (два кабеля) и доставка сигнала контроля (еще один), обеспечивающий выставление правильного положения вала, а значит и используемого инструмента.
Данная конфигурация достаточно проста, чтобы обеспечивать бесперебойное поддержание режимов и оставаться надежной. Такого узла, который стал бы «слабым звеном», попросту нет, поэтому проблемы с эксплуатацией возникают сравнительно редко. Продолжительности ресурса также способствует специфика функционирования, к особенностям которой мы переходим.
Принцип работы аналоговой модификации
В аналоговой модификации полученный сигнал сравним с текущим положением сервомотора, а затем на двигатель поступает сигнал усилителя, вызывающий перемещение двигателя в заданную позицию Показатель частоты процесса составляет 50 раз за одну секунду. Это минимальный показатель времени реагирования. Если же вы отклоните ручку на передатчике, то на сервопривод начнут поступать короткие импульсы, промежуток между которыми станет равняться 20 м/сек. Между импульсами на мотор ничего не поступает, и воздействие извне может изменить функционирование устройства в любую сторону. Этот временной промежуток называется «мертвая зона».
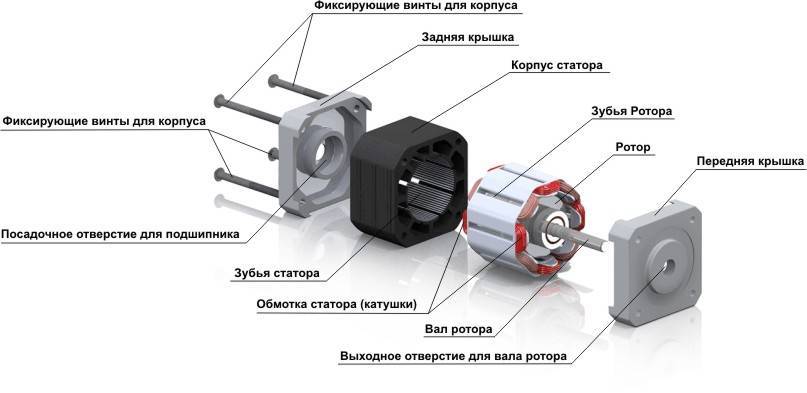
Устройство
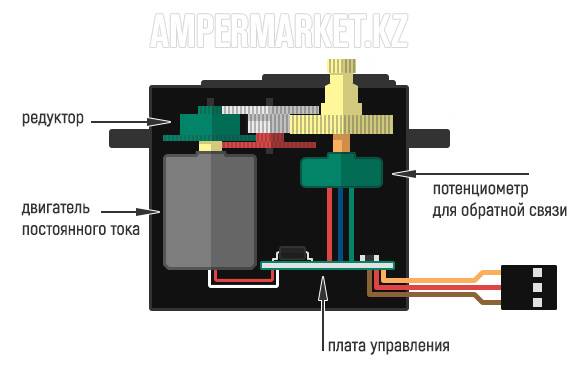
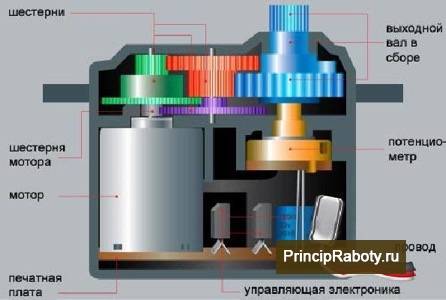 Рисунок 2. Устройство сервопривода
Рисунок 2. Устройство сервопривода
Сервопривод включает в свой состав такие элементы как:
- Приводной механизм – к примеру, это может быть электромотор. Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент;
- Датчики – осуществляют контроль над необходимыми параметрами. Могут быть предназначены для отслеживания положения, усилия, поворота угла или скорости вращения объекта;
- Блок управления – немало важный элемент, так как именно благодаря ему происходит поддержание требуемых параметров в автоматическом режиме;
- Блок питания – питает данный механизм.
Интересно, что самый простой управляющий блок чаще всего создаётся с использованием схемы сравнений значений на датчике и необходимых значений при подаче напряжения определённой полярности на привод.
Характеристики сервоприводов
Устройства выпускаются аналогового и цифрового типов. Приводы внешне ничем не отличаются, но различие между ними существенное. Последние обладают более точной отработкой команд, поскольку управление производится микропроцессорами. Для сервоприводов пишутся и вводятся программы. Аналоговые устройства работают от сигналов микросхем. Их преимуществами являются простое устройство и меньшая цена.
Основными параметрами для выбора являются следующие:
- Питание. Подача напряжения производится по трем проводам. По белому передают импульс, через красный – рабочее напряжение, черный или коричневый является нейтральным.
- Размеры: большие, стандартные и микроустройства.
- Скорость. От нее зависит, за какой промежуток времени вал повернется на угол 60. Недорогие устройства обладают скоростью 0,22 сек. Если требуется высокое быстродействие, она составит 0,06 сек.
- Величина момента. Параметр является приоритетным, поскольку при малом вращающем моменте управление затрудняется.
Режимы управления
Работа сервопривода может осуществляться в трех разных форматах. Рассмотрим каждый из них.
Контроль положения
Здесь нужно сохранять заданный угол поворота вала, подавая последовательность сигналов. Пусть они идут с контроллера – таким образом, можно обеспечить точное позиционирование, что особенно актуально для узлов производственных станков.
Обратите внимание, с помощью совокупности импульсов не проблема задать информацию не только о положении в пространстве, но и о векторе вращения или скорости движения. Сделать это можно одним из трех способов – направляя напряжение:
- со сдвигом фазы на 90 градусов;
- сразу на два входа (SIGN, PULSE – стандартные названия);
- с перемещением по часовой стрелке или против.
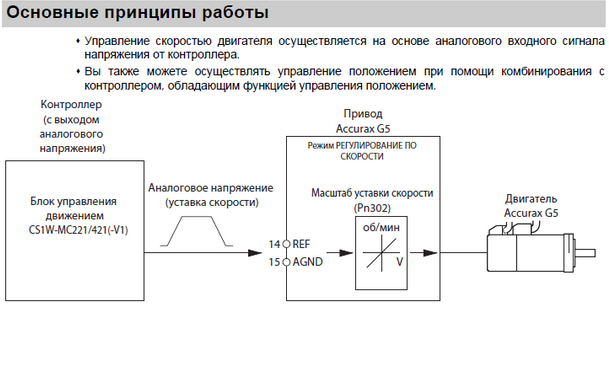
Контроль скорости
Здесь сервоуправление – это увеличение или уменьшение аналогового сигнала на дискретную величину при его подаче на соответствующие обмотки. А если он еще и разнополярный, тогда не составляет труда быстро менять направление вращения.
Данный режим напоминает эксплуатацию асинхронного силового агрегата с преобразователем частоты. Потому что в ее рамках требуется постоянно выполнять разгон и замедление, задавать минимумы и максимумы и тому подобное. Главное – реализовывать не слишком сложный алгоритм, чтобы не превращать рядовую практическую задачу в непосильный труд программирования.
Контроль момента
В данном случае назначение сервопривода – обеспечивать стабильное число оборотов, вне зависимости от того, вращается двигатель или нет. Эта цель достигается путем подачи или дискретного сигнала, или аналогового двухполярного. Метод более чем актуален для оборудования, в процессе эксплуатации требующего смены давления, прижима или других параметров.
Внимание, силовой агрегат должен быть дополнительно оснащен встроенным датчиком тока, ведь именно последний и оценивает значение текущего момента, чтобы потом электроника могла сравнить его с необходимой величиной

Дополнительные примеры скетчей
Следующий код позволяет вам контролировать серводвигатель на пине 2 с помощью потенциометра на аналоговом 0.
#include <SoftwareServo.h>
SoftwareServo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup()
{
myservo.attach(2); // attaches the servo on pin 2 to the servo object
}
void loop()
{
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
SoftwareServo::refresh();
}Следующий код – это поворот (пинг/понг) на выводе A0 с переменной скоростью.
#include <SoftwareServo.h>
SoftwareServo myservo; // create servo object to control a servo
#define pinServo A0
int speed = 1;
int limits = {30,150}; // set limitations (min/max: 0->180)
boolean refresh = false; // toggle refresh on/off
void setup()
{
Serial.begin(9600);
// attaches the servo on pin to the servo object
myservo.attach(pinServo);
// init angle of servo inbetween two limitations
myservo.write((limits-limits)/2);
}
void loop()
{
// refresh angle
int angle = myservo.read();
// change direction when limits
if (angle >= limits || angle <= limits) speed = -speed;
myservo.write(angle + speed);
// set refresh one time / 2
refresh = refresh ? false : true;
if (refresh) SoftwareServo::refresh();
Serial.print("Angle: ");
Serial.println(angle);
}Установка сервопривода. Особенности и нюансы
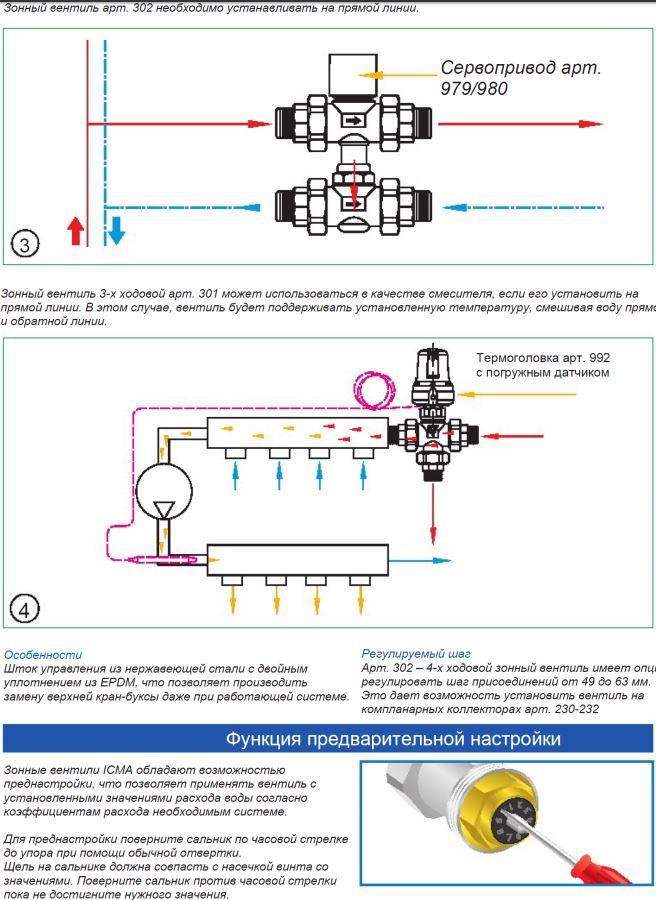
Перед монтажом сервопривода определитесь, с каким типом термостата прибору придется взаимодействовать. В случаях, когда термостат контролирует работу одного водяного контура, оба прибора напрямую связываются между собой проводами. Когда речь идет об использовании мультизонального термостата, прибора, обслуживающего сразу несколько трубопроводов, подключение сервомоторов осуществляется следующим образом.
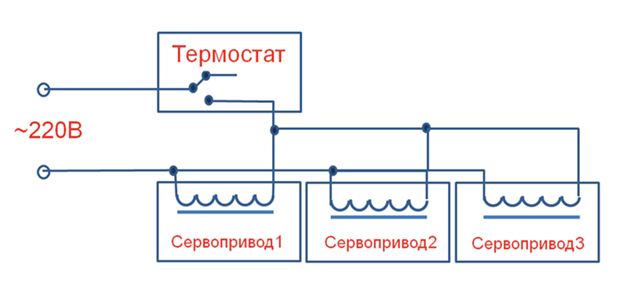
Что бы правильно присоединить все провода и клеммы, используются коммутатор теплого пола. В функции этого устройства входит подключение и соединение устройств различного назначения в единую цепь. Помимо распределительной и связующей функции, коммутатор играет еще роль и предохранителя. В ситуациях, когда закрыты все отсекающие клапаны водяных контуров, коммутатор отключает питание циркуляционного насоса.
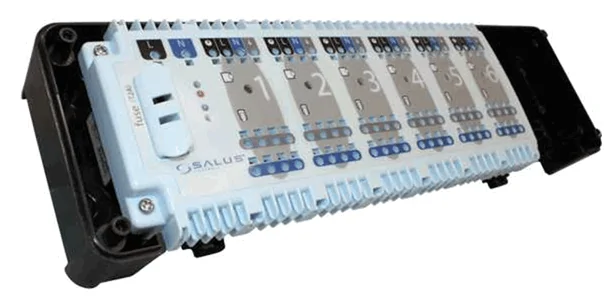
Коммутатор очень удобен в тех случаях, когда теплые полы работают от автоматизированного автономного газового котла. Рисунок показывает, каким образом подключаются термостаты и сервоприводы к единой системе управления.



![Сервоприводы: устройство, принцип работы и основные виды [амперка / вики]](https://movai.ru/wp-content/uploads/a/c/6/ac6efbf2d87c7fac86b296cd26bdc0fc.gif)
Сервопривод[]
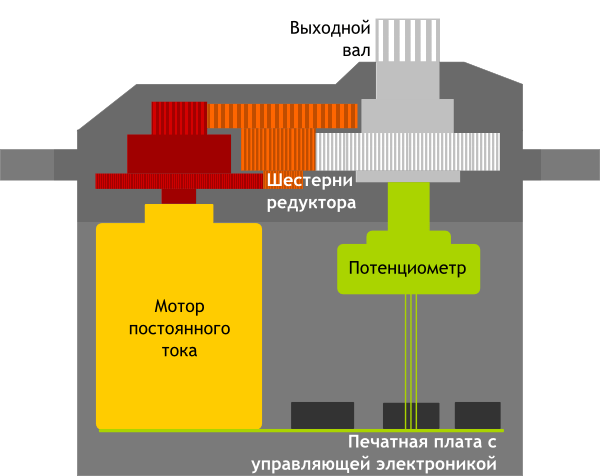
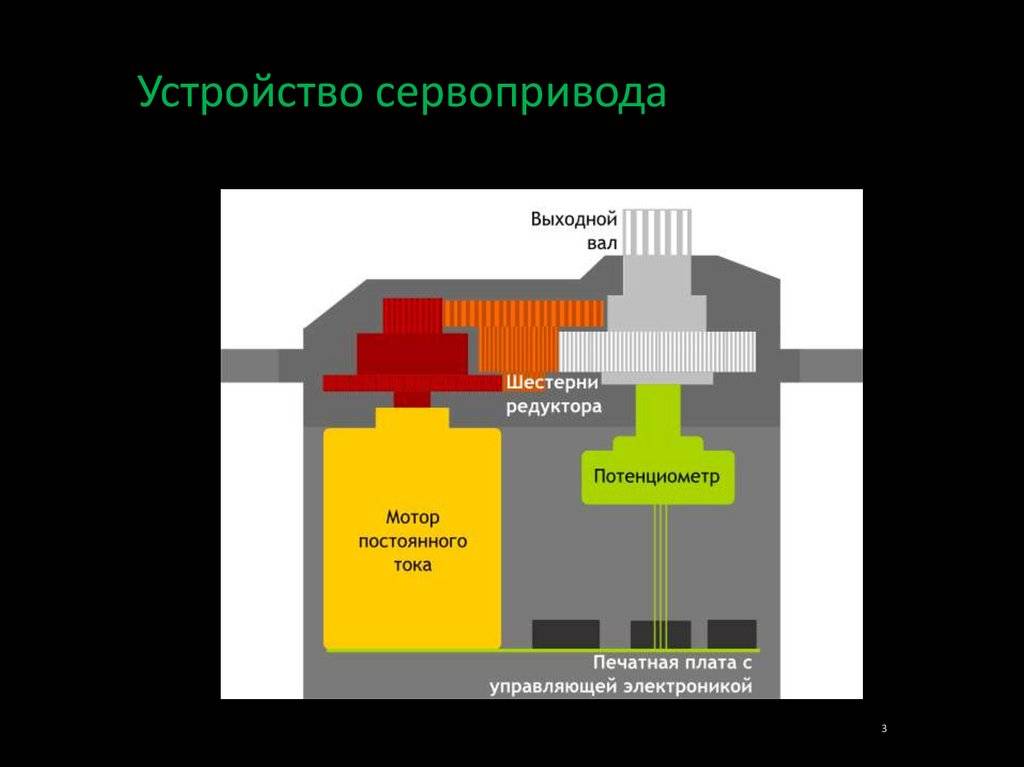
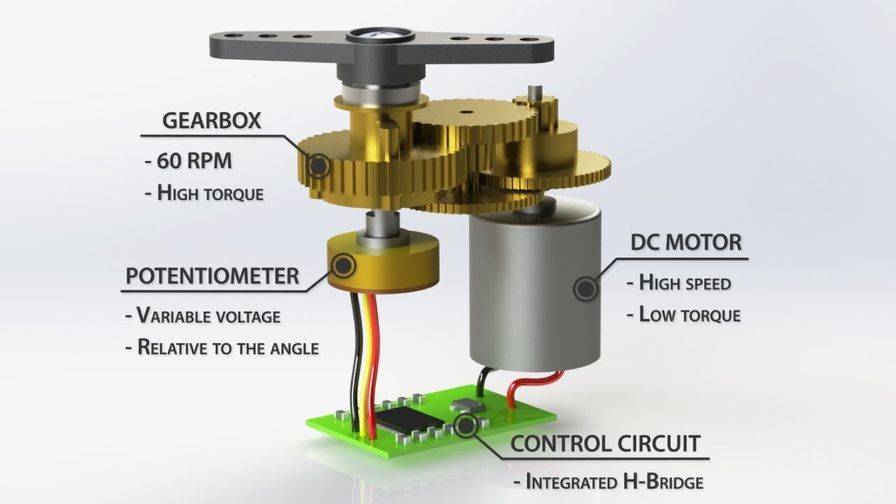
Что такое сервопривод?
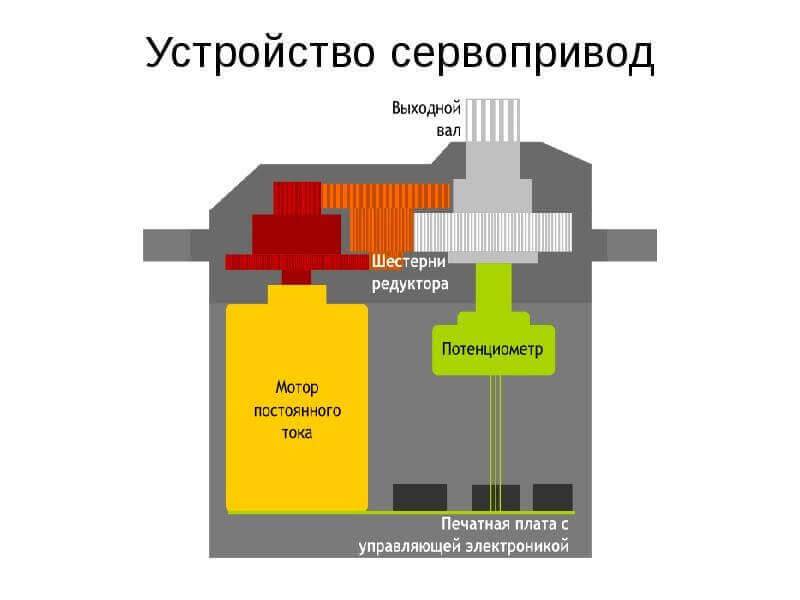
Сервопривод — это, по сути, мотор, положением вала которого мы можем управлять. От обычного мотора он отличается тем, что ему можно точно в градусах задать положение, в которое встанет вал. Сервоприводы используются для моделирования различных механических движений роботов.Сервопривод состоит из двигателя постоянного тока, шестеренного редуктора, потенциометра и электронной схемы.
- Сервопривод получает на вход значение управляющего параметр, например, угол поворота.
- Блок управления сравнивает это значение со значением на своём датчике.
- На основе результата сравнения привод производит некоторое действие, например: поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра
Наиболее распространены сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
Распиновка
| Провод | Назначение |
|---|---|
| Черный | Земля |
| Красный | +5V |
| Оранжевый/Желтый | Управляющий сигнал |
Схема подключения сервопривода к Arduino обычно следующая: черный провод присоединяем к GND, красный провод присоединяем к 5V, желтый провод к цифровому пину. Управление сервоприводом на Arduino достаточно просто, но по углам поворота сервомоторы бывают на 180° и 360°, что следует учитывать при выборе привода.
Краткая справка о библиотеках
- Библиотеки добавляют дополнительную функциональность скетчам, например, при работе с аппаратной частью или при обработке данных. Существует огромное количество библиотек для различного рода датчиков, сенсоров и прочих устройств. Обычно библиотека содержит в себе набор дополнительных команд для работы с ними, что упрощает написание программ. Для использования библиотеки необходимо выбрать меню Скетч > Подключить библиотеку. Одна или несколько директив #include будут размещены в начале кода скетча с последующей компиляцией библиотек и вместе со скетчем. Загрузка библиотек требует дополнительного места в памяти Arduino. Неиспользуемые библиотеки можно удалить из скетча убрав директиву #include.
- Пример:
#include <Servo.h> //подключение библиотеки для работы с сервоприводами #include <Stepper.h> //подключение библиотеки для работы с шаговыми двигателями #include <EEPROM.h> //подключение библиотеки для работы с энергонезависимой памятью
Чтобы управлять сервоприводом существует библиотека Servo.h, которая обладает набором команд для работы с сервоприводами. Чтобы работать с этой библиотекой, прежде всего нужно создать переменную, а точнее объект, типа Servo, обладающую уникальным именем. Все последующие команды будут в формате Имя.команда(). Таким образом к одной Arduino можно подключить несколько сервоприводов и управлять ими одновременно. Основные команды приведены в таблице:
| Команда | Назначение | Пример |
|---|---|---|
| Servo название привода; | Создание переменной типа Servo | Servo Motor1; |
| ИмяСерво.attach(номер пина); | Привязывание мотора к управляющему пину | Motor1.attach(6); |
| ИмяСерво.write(угол); | Задание угла для сервы от 0 до 180. | Motor1.write(90); |
| ИмяСерво.read(); | Считывание последнего положения сервы. | int angle = Motor1.read(); |
Ниже представлен пример кода:
#include <Servo.h> //используем библиотеку для работы с сервоприводом
Servo myservo; //объявляем переменную myservo типа Servo
void setup() //процедура setup
{
myservo.attach(10); //привязываем привод к порту 10
}
void loop() //процедура loop
{
myservo.write(); //ставим вал под 0
delay(2000); //ждем 2 секунды
myservo.write(180); //ставим вал под 180
delay(2000); //ждем 2 секунды
}
Как работают драйвера Linux
В Linux ситуация с драйверами очень сильно отличается. Большинство драйверов для вашего оборудования распространяются в виде открытого программного обеспечения и интегрированы в дистрибутив Linux. Эти драйверы linux, как правило, являются частью ядра Linux, но здесь есть исключение – драйверы видеокарты являются частью программного обеспечения Xorg, а драйверы принтера включены в набор CUPS (система печати).
Это значит, что большинство доступных для linux драйверов уже установлены на вашем компьютере, включены вместе с ядром, в виде модулей ядра или вместе с графическим сервером или сервером печати. Установка драйверов Linux почти не нужна. Драйвера в Linux разработаны, в основном, энтузиастами, но иногда их выпускают сами производители оборудования, которые вносят свой вклад в развитие ядра Linux и других проектов, например, это Intel, AMD, а также другие, более мелкие производители.
Все драйвера установлены из коробки, а значит вам не придется искать драйвера для каждого устройства в вашей системе и вручную их устанавливать. Система автоматически определит ваше оборудование и сама загрузит нужные драйвера в linux. Но здесь есть одно исключение – это проприетарные драйвера ядра linux и прошивки.
Управление сервоприводом
 Решающим фактором в управлении сервоприводами является управляющий сигнал, который представляет собой постоянную частоту и импульсы различной длительности. Длина импульса — один из важнейших параметров, определяющих положение сервопривода. Эту длину можно установить вручную в программе с помощью метода выбора угла или с помощью библиотечных команд. Для каждой марки устройства длина может быть разной.
Решающим фактором в управлении сервоприводами является управляющий сигнал, который представляет собой постоянную частоту и импульсы различной длительности. Длина импульса — один из важнейших параметров, определяющих положение сервопривода. Эту длину можно установить вручную в программе с помощью метода выбора угла или с помощью библиотечных команд. Для каждой марки устройства длина может быть разной.
При поступлении сигнала в схему управления генератор издает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы сравнивается длительность подаваемого сигнала и сигнала от генератора. Если эти сигналы имеют разную длительность, включается электродвигатель, направление вращения которого определяется тем, какой из импульсов короче. Если длительность импульса такая же, двигатель останавливается.
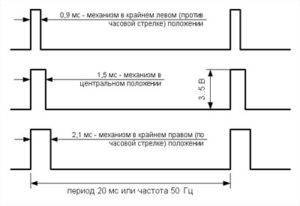
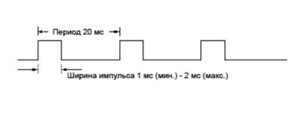
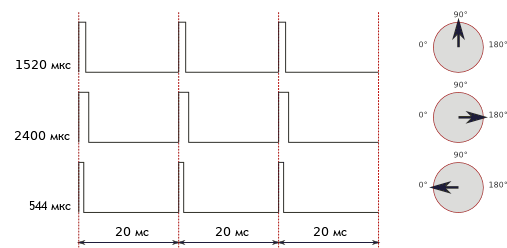
Стандартная частота, с которой доставляются импульсы, составляет 50 Гц, то есть 1 импульс каждые 20 миллисекунд. При этих значениях продолжительность составляет 1520 микросекунд, а сервопривод находится в центральном положении. Изменение длительности импульса приводит к вращению сервопривода — при увеличении длительности вращение выполняется по часовой стрелке, при уменьшении — против часовой стрелки. Есть ограничения по длительности: в Arduino в библиотеке Servo для 0 ° значение импульса установлено на 544 мкс (нижний предел), для 180 ° — 2400 мкс (верхний предел).
(Изображение использовано сайтом amperka.ru)
важно учитывать, что настройки на конкретном устройстве могут незначительно отличаться от общепринятых значений. Для некоторых устройств среднее положение и длительность импульса могут составлять всего 760 мкс. Все принятые значения также могут незначительно отличаться из-за ошибки, которая может быть допущена при изготовлении устройства
Все принятые значения также могут незначительно отличаться из-за ошибки, которая может быть допущена при изготовлении устройства.
Метод управления приводом часто ошибочно называют ШИМ / ШИМ, но это не совсем правильно. Контроль напрямую зависит от длительности импульсов, частота их появления не так уж и важна. Правильная работа будет обеспечена как на 40 Гц, так и на 60 Гц, только резкое уменьшение или увеличение частоты будет способствовать. В случае резкого падения сервопривод начнет работать рывками; если частота завышена выше 100 Гц, устройство может перегреться. Поэтому правильнее называть его PDM.
Внутренний интерфейс можно разделить на аналоговые и цифровые сервоприводы. Внешних отличий нет — все отличия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровую — микропроцессор, который принимает и анализирует импульсы.
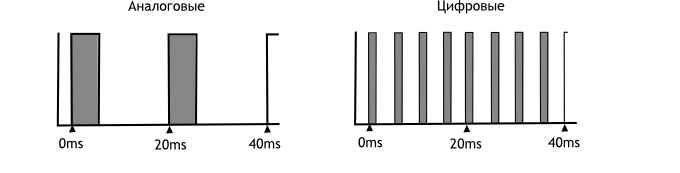
Получив сигнал, аналоговый сервопривод решает, менять положение или нет, и, при необходимости, посылает на двигатель сигнал с частотой 50 Гц.В течение времени реакции (20 мс) могут возникать внешние воздействия, которые будут измените положение сервопривода и устройство не успеет среагировать. Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с более высокой частотой — от 200 Гц, чтобы он мог быстрее реагировать на внешние воздействия, быстрее развивать требуемую скорость и крутящий момент. В результате цифровой сервопривод лучше удерживает заданное положение. Однако цифровой сервопривод требует большей мощности для работы, что увеличивает стоимость. Сложность их изготовления также сильно влияет на цену. Единственным недостатком цифровых сервоприводов является высокая стоимость, технически они намного лучше аналоговых устройств.
Демонстрационнаяпрограмма приведена ниже, показано, как использовать сервомоторов смикроконтроллером AVR. Работы программы очень проста, она начинается синициализации таймера и PWM.В начале фиксируеться сервопривод на 0 градусов, азатем перемещается на 90 градусов и подождатв некоторое время перемещается на135 градусов, и наконец, на 180градусов. Этот процесс повторяется до тех пор, пока привод подключен к питанию.
Параметры для корректного функционирования программы.
- Предохранитель LOW = 0xFF и предохранитель HIGH = 0xC9
- Частота = 16 МГц.
- Серводвигатель Futaba S3003 .
- MCU — это однокристальный микроконтроллер AtMega32 или ATmega16.
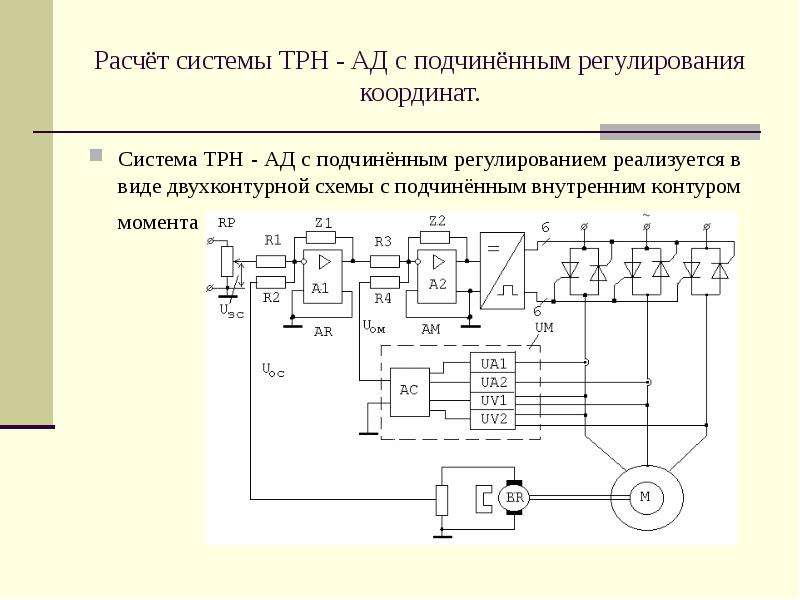
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Драйвер шагового двигателя TB6600
Драйвер TB6600
| Максимум. Текущий | 4А |
| Шаговый двигатель | NEMA 14,17,23 (до 4A) |
| Источник питания | 9-42В |
Краткие технические характеристики
Драйвер TB6600 — очень популярный драйвер, который чаще всего используется для питания двигателей NEMA 17 и NEMA 23.
Шаговая ИС этого драйвера производится Toshiba. Если быть очень точным, использованный шаговый двигатель — TB67S109A, а не TB6600.




Но по характеристикам аналогичен TB6600.
Он имеет семь предустановленных выходных токов (0,5 А / 1,0 А / 1,5 А / 2,0 А / 2,5 А / 2,8 А / 3,0 А / 3,5 А), которыми можно управлять с помощью шестизначного DIP-переключателя на драйвере.
Максимальный выходной ток, который можно установить с помощью DIP-переключателей, составляет 3,5 А, что ниже теоретического максимального тока 4 А.
На мой взгляд, этот драйвер может хорошо работать, если ваши требования до 3А. Кроме того, он шумит и нагревается.
Как и другие драйверы шагового двигателя для станков с ЧПУ в этом диапазоне, он имеет встроенные функции защиты от перегрузки по току и температуры.
Этот шаговый двигатель имеет пять предустановленных режимов микрошага (1/1, 1/2, 1/4, 1/8, 1/16, 1/32), которыми можно управлять с помощью DIP-переключателей.
Драйвер шагового двигателя TB6600 с DIP-переключателями сбоку
Источник питания, который можно использовать для запуска этого шагового двигателя, составляет 9–42 В с рекомендуемым напряжением 12–30 В.
На всякий случай лучше не превышать 30 Вольт.
Большинство пользователей используют этот шаговый двигатель при напряжении 24 В, поскольку они получают нужные обороты и крутящий момент при этом напряжении питания.
По словам производителя, этот шаговый двигатель идеально подходит для достижения целевого крутящего момента 255 унций на дюйм или ниже.
Что мне показалось наиболее интересным в этом шаговом двигателе, так это то, что он предлагает ток не менее 3 А без шума, почти вдвое дешевле, чем DM542T.
Помните, что с этим контроллером мотора или DM542T вам понадобится три таких контроллера для работы трехосного ЧПУ.
Если ваш бюджет ограничен, а требования к току шагового двигателя ниже 3А, я предлагаю вам получить это. В противном случае я предлагаю вам выбрать DM542T или DM556 — улучшенный аналог DM542T.
TB6600Скачать
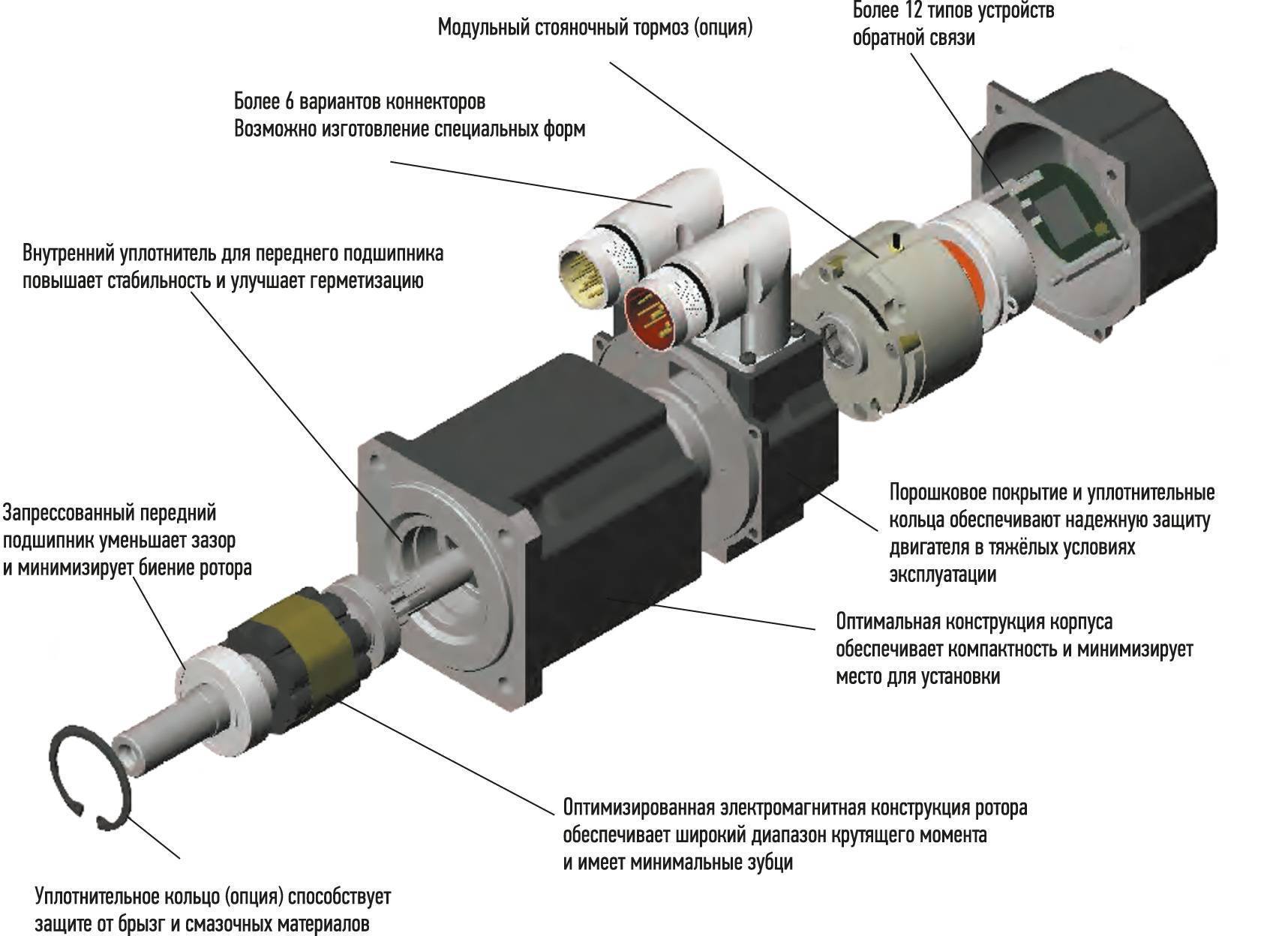
Виды сервоприводов
Сервоприводы бывают аналоговые и цифровые. Различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостаток — дороговизна.
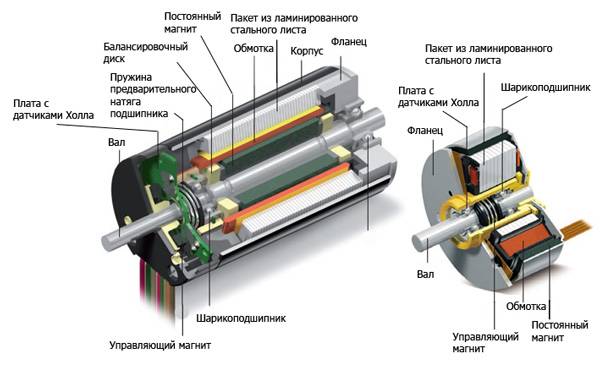
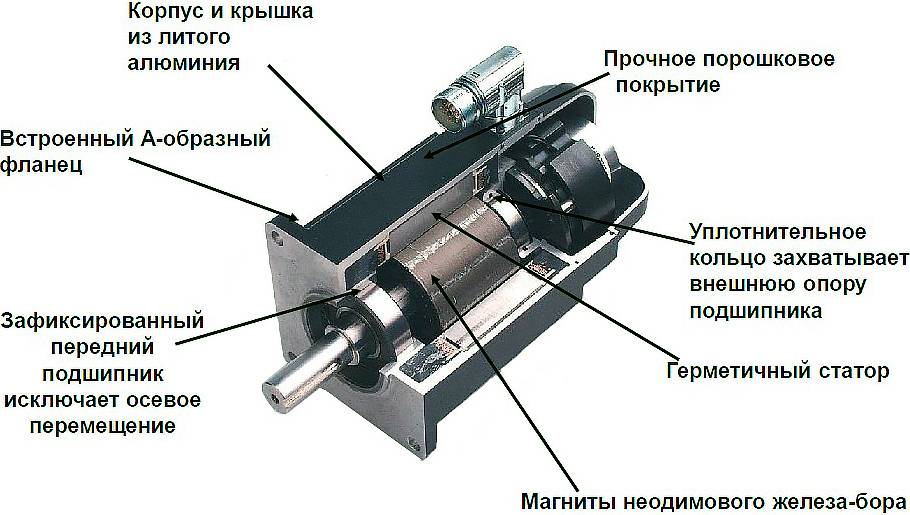
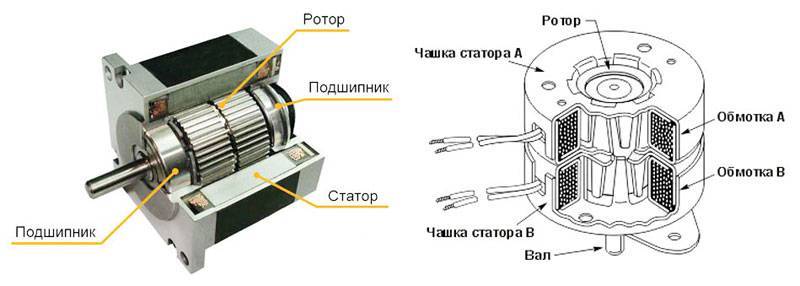
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. У бесколлекторных моторов нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Элементы платы

Микроконтроллер ATmega48PA
Плата Multiservo Shield выполнена на микроконтроллере ATmega48PA с прошивкой управления сервоприводами от Амперки. Чип принимает команды по I²C интерфейсу от внешней управляющей платы, например Arduino Uno или Iskra JS, и рулит до 18 сервоприводами в одно время.
Силовой клеммник питания
Для питания сервомоторов используйте клеммник под винт PWR IN.
| Силовой клеммник | Подключение |
|---|---|
| PWR + | Силовое питание |
| PWR − | Земля |
Диапазон входного напряжение должен соответствовать рабочему напряжению подключаемых сервоприводов, т.е. сколько приложили на силовой клеммник, столько и поступит на линию питания моторов. Номинальное напряжения большинства хобби сервоприводов не выходит за рамки диапазона от 5 до 12 вольт.
В качестве источника питания рекомендуем взять:
- Сборку из батареек AA:
- стационарный блок питания:
- И другие источники напряжения.
Контуры питания
На плате расширения MultiServo Shield присутствует два контура питания.
- Силовой контур Vs. Напряжение питания сервомоторов, которое поступает от . Диапазон входного напряжение должен соответствовать номинальному питанию моторов, а суммарный максимальный ток потребления не должен превышать 10 А.
- Цифровой контур Vss. Напряжение питания микроконтроллера и другой вспомогательной логики. Цифровое питание поступает через пин 5V от внешней управляющей платы, например от USB. Входное напряжение соответственно равно 5 вольт, а максимальный ток потребления не более 50 мА.
Если отсутствует хотя бы один из контуров питания Vs или Vss — Multiservo Shield работать не будет. Для информации о текущем состоянии каждого контура .





Джаммер объединения питания
На плате расширения MultiServo Shield , т.е. для работы схемы необходимо два источника напряжения.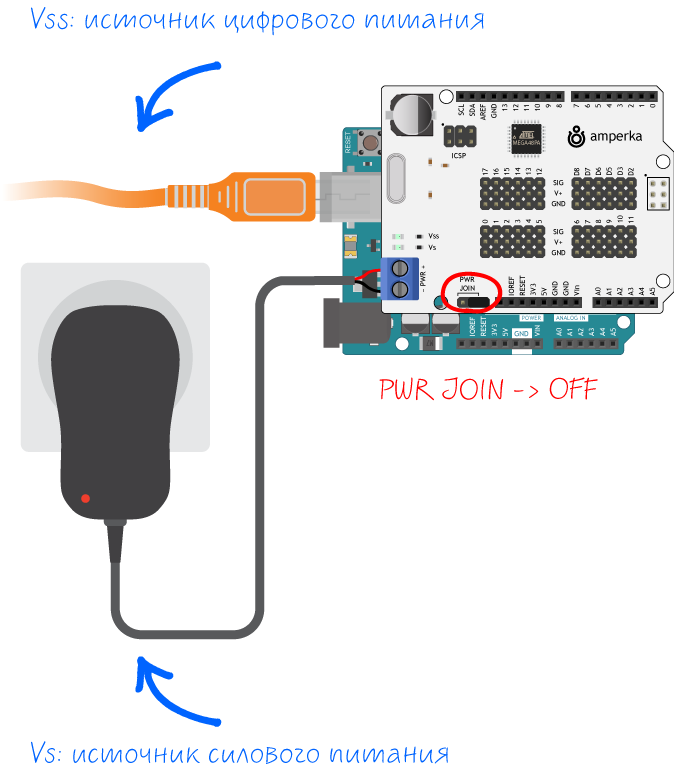
При установки джампера в положение PWR JOIN, происходит объединение положительного контакта + силового клеммника PWR IN с пином Vin управляющей платформы. Режим объединённого питания позволяет запитывать всё устройство от одного источника напряжения. 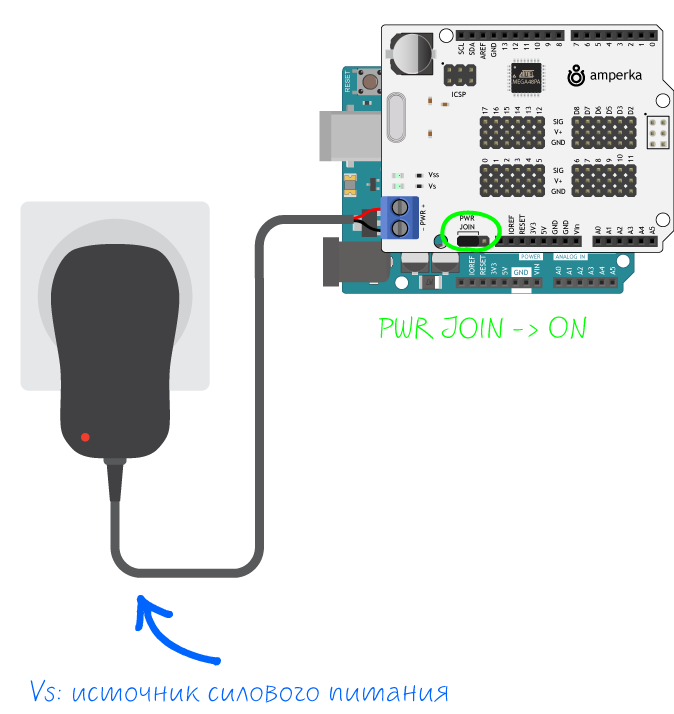
Выбор питания
При объединённом режиме PWR JOIN, напряжение на устройство может быть подано двумя способами:
- На драйвер сервомоторов через клеммник PWR IN.
- На управляющую плату через внешний DC-разъём.
Правила
При объединённом режиме PWR JOIN, важно знать:
- При работе двигателей по цепи питания может проходить большой ток, на который цепь Vin управляющей платформы может быть не рассчитана. Поэтому выбор питания через силовой клеммник PWR IN предпочтительнее.
- Источник питания должен быть способен обеспечить стабильное напряжение при резких скачках нагрузки. Даже кратковременная просадка напряжения может привести к перезагрузке управляющей платформы. В итоге программа начнётся сначала и поведения двигателей будет неадекватным.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| Vs / PON | Индикатор подачи силового питания. Горит — напряжение есть, не горит — напряжение нет. |
| Vss / ųON | Индикатор подачи цифрового питания. Горит — напряжение есть, не горит — напряжение нет. |
Troyka-контакты подключения сервоприводов
Сервоприводы подключаются к плата Multiservo Shield через контактные штыри S-V-G, где:
- S — сигнал с номером от 0 до 18.
- V — питание сервомоторов. Берется от силового клеммника.
- G — земля.
На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к .
Troyka-контакты ввода-вывода общего назначения
На плате доступны шесть Troyka-контактов ввода-вывода внешнего контролера, которые можно задействовать в дополнение к основным. Контакты пронумерована S-V-G, где:
- S — сигнал с номером: D2, D3, D5, D6, D7 и D8.
- V — питание от силового клеммника.
- G — земля.
На линии V будет присутствовать не логическое питание платформы 3,3 / 5 В, а напряжение Vs приложенное к .
ICSP-разъём ATmega48PA
На плате расположен ICSP-разъём, который предназначен для загрузки прошивки в микроконтроллер ATmega48PA через внешний программатор. В нашем случае — это мост, который получает команды по I²C и рулит 18 сервоприводами.
Плата Multiservo Shield выполнена в форм-факторе Arduino Shield R3. а это значит расширение просто одевается сверху на управляющую платформу форм-фактора Arduino R3 методом бутерброда без дополнительных проводов и пайки. В итоге вам остаются доступны все физические контакты вашего контроллера для дальнейшего использования.





